Béda 5 – robot pro soutěž RoboRAVE 2016
Popis funkce
Robot domácí výroby pro soutěž RoboRave 2016 – Doprava míčků
s automatickým nakládáním, obsahující DC motory z tiskárny HP DeskJet,
mechanika včetně převodů a kol vytištěná 3D tiskárnou, řídící systém založený
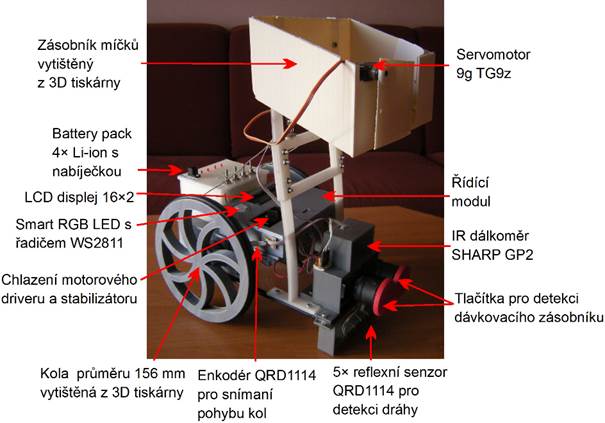
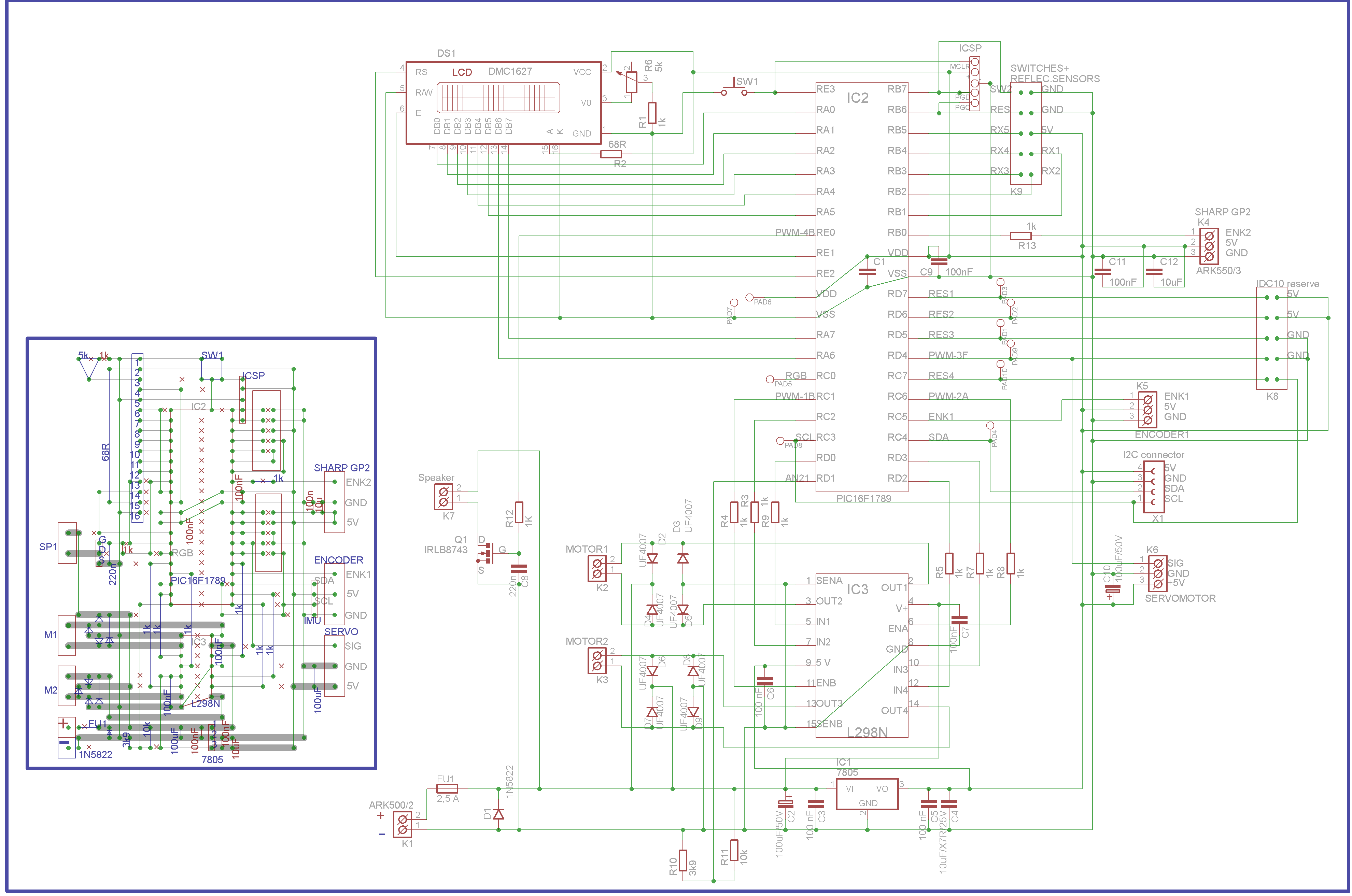
na vlastní desce s PIC16F1789, s motorovým driverem L298N, LCD displejem 16x2,
SmartRGB LED, 6 reflexními senzory QRD1114 pro sledování černé čáry a enkodér
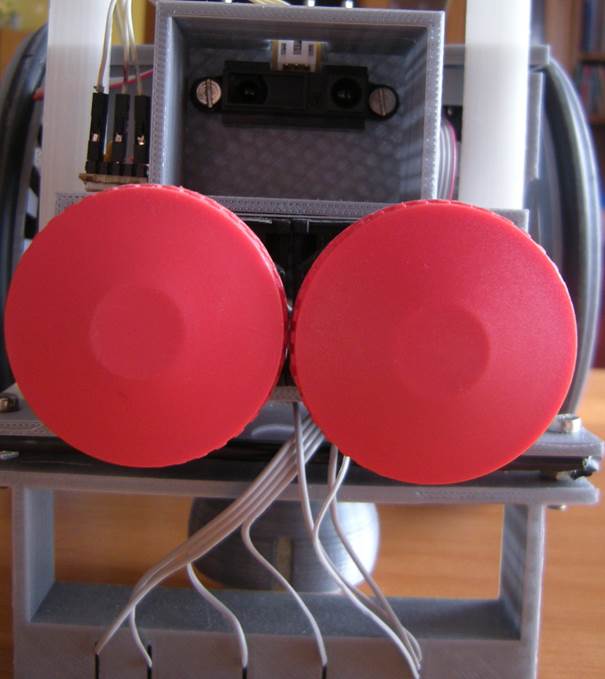
kola, se dvěma předními tlačítky, infračerveným dálkovým senzorem Sharp GP2,
zásobníkem míčků otevíraným servomotorem TG9z, napájený z akumulátorové sady se
4 Li-ion akumulátory 2,2 Ah nabíjenými z 5V zdroje pomocí nabíjecí elektroniky
s čipem MCP73831.
Robot jezdí po černé čáře, detekuje křižovatku, stiskává
tlačítko u zásobovací věže, čímž nabere míčky do svého zásobníku, otočí se a
jede směrem ke krabici, před ní se zastaví, vycentruje se, servomotorem otevře
víko zásobníku míčků a vše vysype do krabice. Jestliže robotovi zbyde čas,
otočí se znovu nabrat míčky k zásobovací věži, jinak se vrátí zpět na
start.
Týmový projekt HaHaHa Robotics:
· Martina: Návrh, osazení a pájení plošného spoje, výroba
podvozku a battery pack
· Marek: Kreslení ve SketchUp, výroba modelů věže a krabice,
testování robota.
· Michal: Algoritmus programu, programování PIC16F v C,
konstrukce mechanických částí a modelů pro 3D tisk
· Táta: Odborná pomoc: nastavení registrů PIC, konstrukce
převodovky, kontrola návrhu DPS
Vyráběn od října 2015 do února 2016.
Mechanické součásti
-
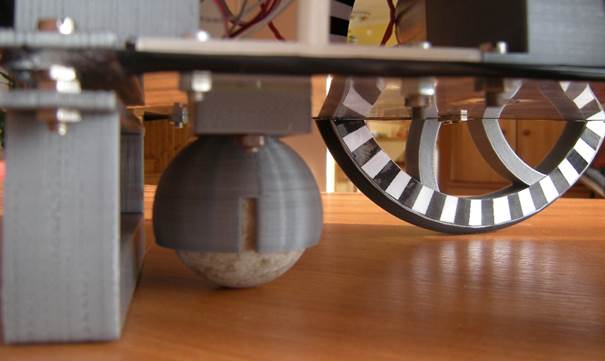
přední kolo: ping – pongový míček v držáku vytištěném
z 3D tiskárny PRUSA i3, materiál PLA, model z http://www.thingiverse.com/thing:636967
-
zadní kola: Ø156 mm vytištěná z 3D tiskárny,
materiál PLA, upravený parametrický model z http://www.thingiverse.com/thing:21486
-
pneumatiky zadních kol, kruhový profil EPDM 8 mm
-
podvozek: polykarbonátová deska 120 × 250 mm z tiskárny
HP Desk Jet
-
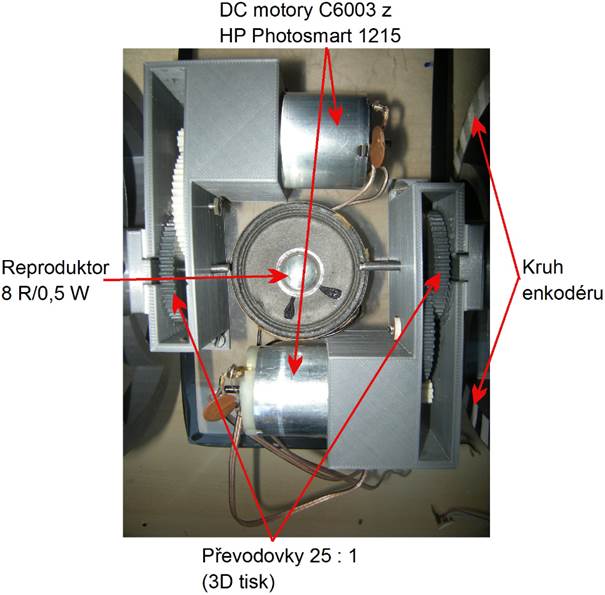
2×převodovka: 25:1 vytištěná z 3D tiskárny, materiál PLA,
ozubená kola upravena z parametrického modelu z http://www.thingiverse.com/thing:3575
-
držák reflexních senzorů vytištěný z 3D tiskárny,
materiál PLA, vlastní konstrukce (viz model SketchUp níže)
-
držák tlačítek a IR dálkoměru Sharp GP2 vytištěný z 3D
tiskárny, materiál PLA, vlastní konstrukce (viz model SketchUp níže)
-
krabička řídící desky s víkem vytištěná z 3D tiskárny,
materiál PLA, vlastní konstrukce (viz model SketchUp níže)
-
krabička battery pack s víkem vytištěná z 3D tiskárny,
materiál PLA, vlastní konstrukce (viz model SketchUp níže)
-
zásobník míčků s výsypkou vytištěný z 3D tiskárny, materiál
PLA, vlastní konstrukce (viz model SketchUp níže)
-
stojan pro výsypku vytištěný z 3D tiskárny, materiál
PLA, vlastní konstrukce (viz model SketchUp níže)
Elektronické součásti
-
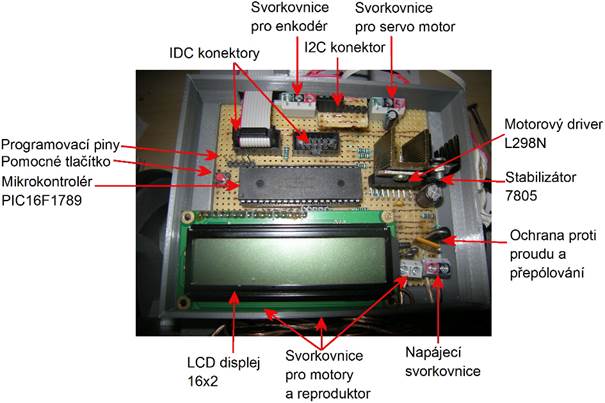
Mikrokontrolér řídící desky: PIC16F1789
-
Vstupy řídícího systému
·
přední narážecí tlačítko
PCB5-EC-4-5 (2 ks zapojené paralelně) pro stisknutí tlačítka na věži
automatického zásobníku
·
5×reflexní senzory
QRD1114 pro detekci černé
čáry a křižovatek
·
1×reflexní senzor QRD1114 jako enkodér pohybu kola
·
IR dálkoměr Sharp GP2Y0A41SK0F (4 – 30 cm) pro detekci
krabice
·
Rezerva 4 DI/DO například pro ultrazvukové senzory nového
robota
-
Výstupy řídícího systému
·
LCD displej alfanumerický 16×2
·
dvojitý obousměrný motorový driver L298N (2×2 A)
·
signalizační SMART LED s řadičem WS2811
·
servomotor 9g
TG9z pro odklápění víka výsypky
·
reproduktor: 8
Ω/0,5 W (v tomto programu nepoužit)
-
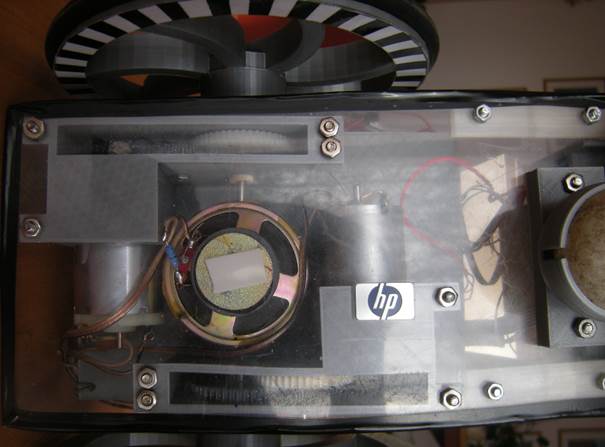
Pohon robota: 2 DC
motory C6003 vymontované z tiskárny HP Photosmart 1215
-
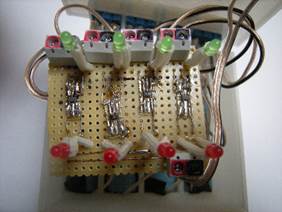
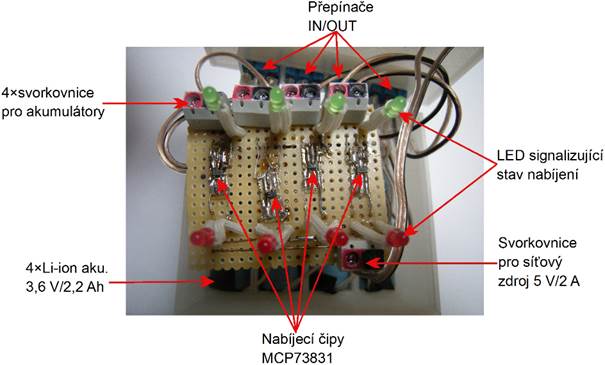
Battery pack: 4×Li-ion akumulátory 3,6 V/2,2 Ah, samostatně
nabíjené přes nabíjecí čipy MCP73831
-
Plošný spoj: univerzální plošný spoj e=0.1´
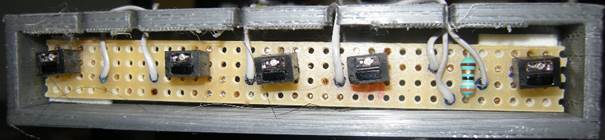
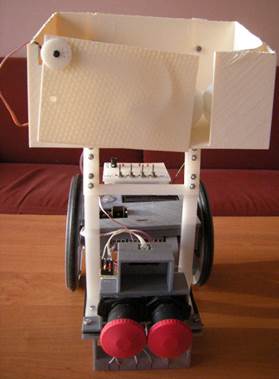
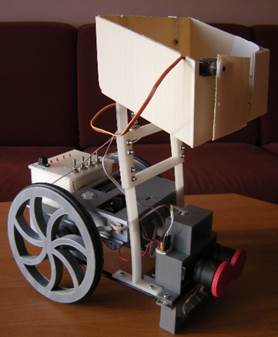
Celkový pohled na robota
Motory
Řídící deska
|
Kód
|
Typ
|
Parametry
|
Funkce
|
|
C1
|
kondenzátor
|
keramický 100 nF SMD
0805
|
filtrace napájení MCU
|
|
C2
|
kondenzátor
|
elektrolytický 100 µF/50
V
|
filtrace vstupu
stabilizátoru
|
|
C3
|
kondenzátor
|
keramický 100 nF SMD
0805
|
filtrace vstupu
stabilizátoru
|
|
C4
|
kondenzátor
|
keramický
10 µF /X7R/25 V SMD 0805
|
filtrace výstupu
stabilizátoru
|
|
C5
|
kondenzátor
|
keramický 100 nF
|
filtrace výstupu
stabilizátoru
|
|
C6
|
kondenzátor
|
keramický 100 nF
|
filtrace napájení
driveru
|
|
C7
|
kondenzátor
|
keramický 100 nF
|
filtrace napájení
driveru
|
|
C8
|
kondenzátor
|
keramický 220 nF
|
RC filtr na vstupu do
reproduktoru
|
|
C9
|
kondenzátor
|
keramický 100 nF SMD
0805
|
filtrace napájení MCU
|
|
C10
|
kondenzátor
|
elektrolytický
100 µF /50 V
|
filtrace napájení servo
motoru
|
|
C11
|
kondenzátor
|
keramický 100 nF SMD
0805
|
filtrace napájení IR
senzoru
|
|
C12
|
kondenzátor
|
keramický 10 µF SMD 0805
|
filtrace napájení IR
senzoru
|
|
D1
|
dioda
|
1N5822
|
ochrana proti
přepólování
|
|
D2 -D9
|
diody
|
UF4007
|
ochrana výstupu driveru
|
|
DS1
|
LCD displej
|
alfanumerický 16x2
|
nastavování a
zobrazování programových parametrů
|
|
FU1
|
pojistka
|
polymerová 2,5 A
|
ochrana proti
přepólování a zkratu
|
|
IC1
|
stabilizátor
|
7805
|
stabilizátor na 5 V
|
|
IC2
|
mikrokontrolér
|
PIC16F1789
|
programové řízení obvodu
|
|
IC3
|
motorový driver
|
L298N
|
obousměrný motorový
driver 2x2 A
|
|
|
programovací piny
|
ICSP
|
programovací piny PIC
|
|
K1
|
svorkovnice
|
ARK500/2
|
napájecí svorkovnice
|
|
K2
|
svorkovnice
|
ARK500/2
|
připojení motoru
|
|
K3
|
svorkovnice
|
ARK500/2
|
připojení motoru
|
|
K4
|
svorkovnice
|
ARK550/3
|
připojení IR dálkoměru
|
|
K5
|
svorkovnice
|
ARK550/3
|
připojení enkodéru
|
|
K6
|
svorkovnice
|
ARK550/3
|
připojení servo motoru
|
|
K7
|
svorkovnice
|
ARK500/2
|
připojení reproduktoru
|
|
K8
|
konektor
|
IDC10
|
připojení tlačítek a
reflexních senzorů
|
|
K9
|
konektor
|
IDC10
|
rezerva pro externí
vstupy/výstupy
|
|
MOTOR-MOTOR2
|
motory
|
DC motory C6003
vymontovaný z tiskárny HP Photosmart 1215
|
pohon kol robota
|
|
PAD1 – PAD10
|
pájecí piny
|
|
pomocné konektory pro
externí vstupy a výstupy
|
|
Q1
|
tranzistor
|
IRLB8743
|
spínání reproduktoru z
PIC
|
|
R1
|
rezistor
|
1 kΩ
|
nastavování kontrastu
LCD displeje
|
|
R2
|
rezistor
|
68 Ω
|
podsvícení displeje
|
|
R3
|
rezistor
|
1 kΩ
|
ochrana vstupu driveru
|
|
R4
|
rezistor
|
1 kΩ
|
ochrana vstupu driveru
|
|
R5
|
rezistor
|
1 kΩ
|
ochrana vstupu driveru
|
|
R6
|
trimr
|
5kΩ
|
nastavení kontrastu
displeje
|
|
R7
|
rezistor
|
1 kΩ
|
ochrana vstupu driveru
|
|
R8
|
rezistor
|
1 kΩ
|
ochrana vstupu driveru
|
|
R9
|
rezistor
|
1 kΩ
|
ochrana vstupu driveru
|
|
R10
|
rezistor
|
3,9 kΩ
|
odporový dělič pro měření
baterie
|
|
R11
|
rezistor
|
10 kΩ
|
odporový dělič pro
měření baterie
|
|
R12
|
rezistor
|
1 kΩ
|
zvukový RC filtr
|
|
R13
|
rezistor
|
1 kΩ
|
ochrana analogového
vstupu PIC
|
|
RGB
|
RGB LED
|
HC-F5V-F20-WS2811, SMART
RGB s řadičem WS2811
|
signalizace stavu
programu
|
|
SERVO MOTOR
|
servomotor
|
9 g TG9z
|
odklápění výsypky míčků
|
|
Speaker
|
reproduktor
|
8 Ω/0,5 W
|
akustická signalizace
|
|
SW1
|
tlačítko
|
tlačítko do DPS
|
pomocné tlačítko
(rezerva)
|
|
SW2
|
hříbkovité tlačítko
|
PCB5-EC-4-5 (2 ks
zapojené paralelně
|
stisknutí tlačítka
dávkovací věže
|
|
X1
|
dutinka 4x
|
|
rozšiřovací konektor pro
komunikaci
s I2C
|
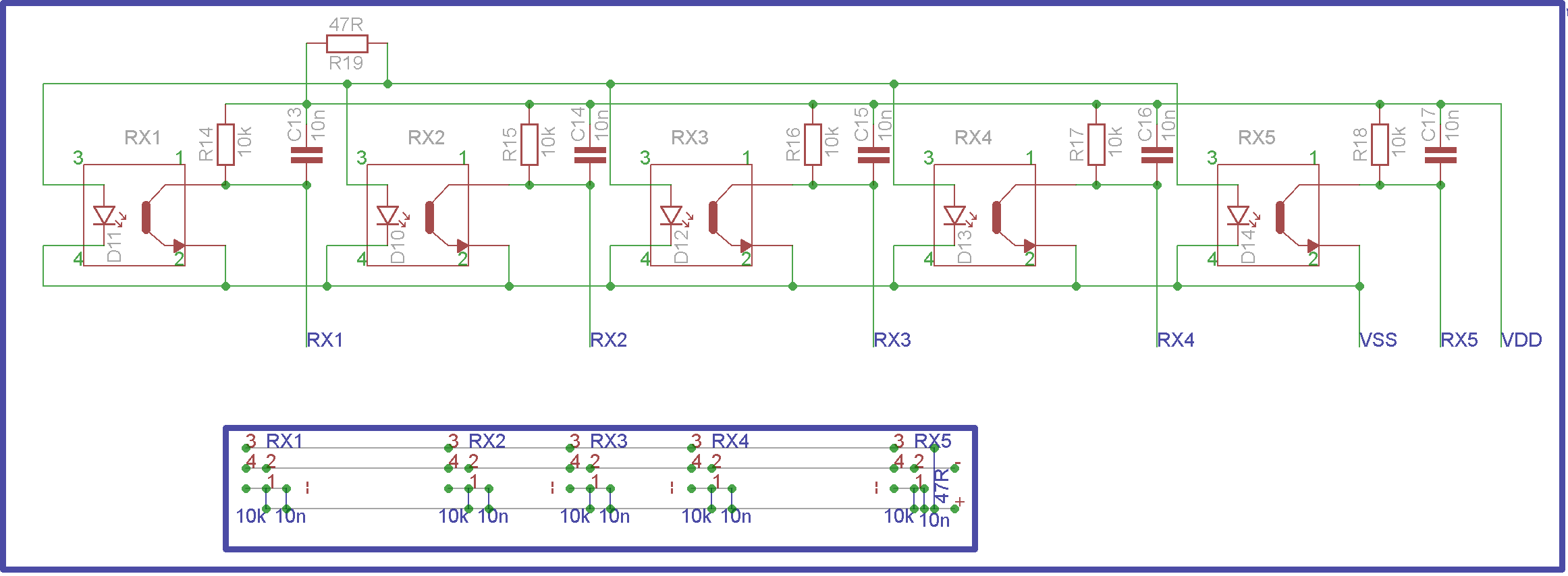
Reflexní senzory
|
Kód
|
Typ
|
Parametry
|
Funkce
|
|
C13 – C17
|
kondenzátor
|
keramický 10 nF SMD 0805
|
filtrace z výstupu
fototranzistoru
|
|
R14 – R18
|
rezistor
|
10 kΩ
|
rezistory
fototranzistorů reflexních senzorů
|
|
R19
|
rezistor
|
47 Ω
|
omezení proudu do LED
diod reflexních senzorů
|
|
RX1 – RX5
|
reflexní senzory
|
QRD1114
|
detekce dráhy
|
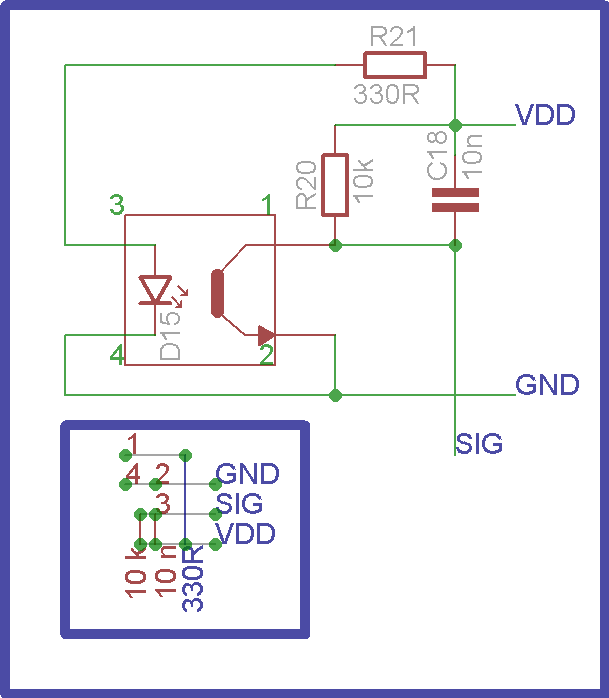
Enkodér

|
Kód
|
Typ
|
Parametry
|
Funkce
|
|
C18
|
kondenzátor
|
keramický 10 nF SMD 0805
|
filtrace z výstupu
fototranzistoru
|
|
R20
|
rezistor
|
10 kΩ
|
rezistor fototranzistoru
reflexního senzoru
|
|
R21
|
rezistor
|
330 Ω
|
omezení proudu do LED
diod reflexního senzoru
|
|
ENCODER
|
reflexní senzor
|
QRD1114
|
detekce pohybu kol
|
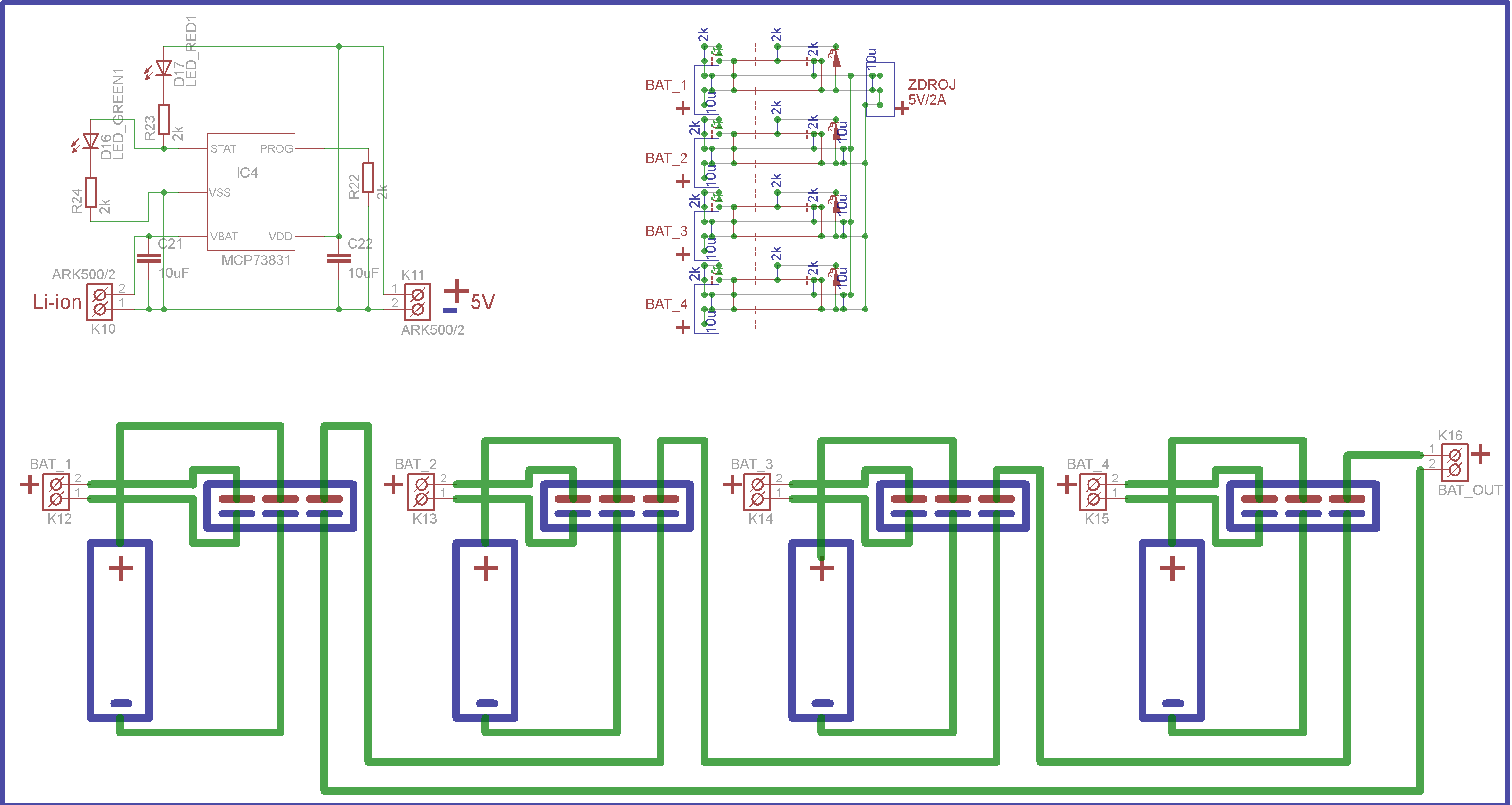
Battery pack




|
Kód
|
Typ
|
Parametry
|
Funkce
|
|
C21
|
kondenzátor
|
keramický 10 µF/25V SMD
1210 (4 ks)
|
filtrace výstupů
z nabíjecího čipu
|
|
C22
|
kondenzátor
|
keramický 10 µF/25V SMD
1210 (4 ks)
|
filtrace napájení čipu
|
|
D16
|
LED dioda
|
zelená indikační LED
3 mm/ 2 mA
|
indikace stavu nabíjení
|
|
D17
|
LED dioda
|
červená indikační LED
3 mm/ 2 mA
|
indikace stavu nabíjení
|
|
IC4
|
integrovaný obvod
|
MCP73831 (4 ks)
|
nabíjení jednočlánkové
Li-ion baterie
|
|
K10
|
svorkovnice
|
ARK500/2 (4 ks)
|
připojení Li-ion
akumulátoru
|
|
K11
|
svorkovnice
|
ARK500/2 (4 ks)
|
připojení zdroje
nabíjení
|
|
R22
|
rezistor
|
2 kΩ SMD 0805
|
volba nabíjecího proudu
|
|
R23
|
rezistor
|
2 kΩ SMD 0805
|
omezuje proud na LED
|
|
R24
|
rezistor
|
2 kΩ SMD 0805
|
omezuje proud na LED
|
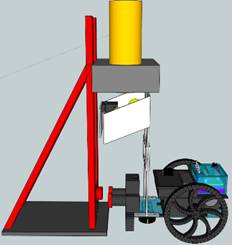
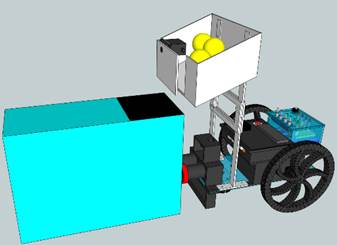
3D model ve SketchUp:
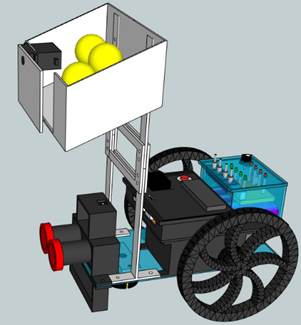
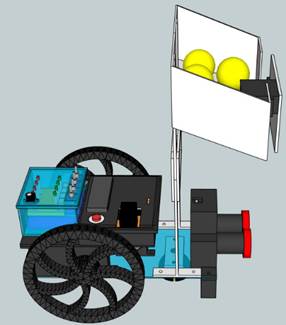
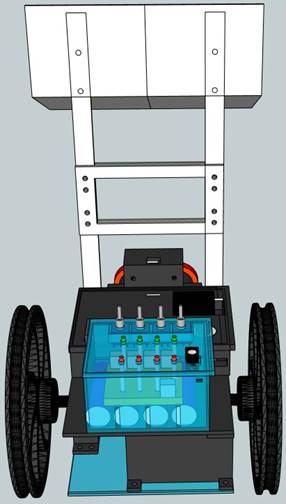
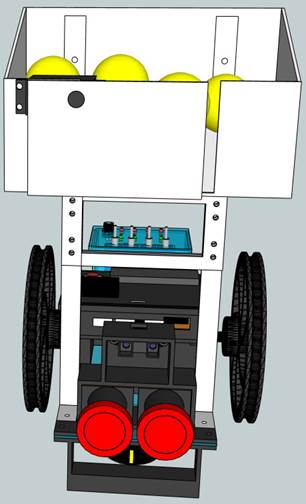
Pohledy na robota:
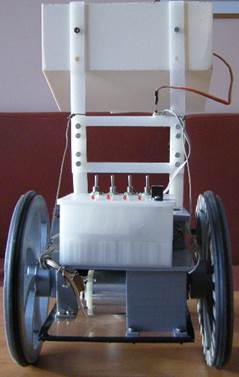
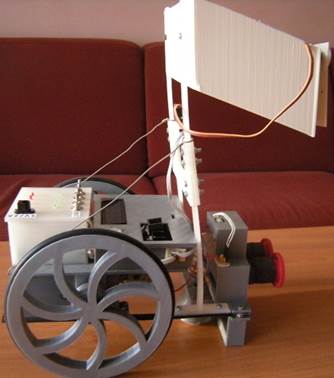


Robot u
věže: Robot u krabice:


Přední tlačítka s IR senzorem
Pohled na zásobník míčků shora

Podvozek robota - přední část
Podvozek robota - zadní část
Soubory

