Řídící
deska všesměrově jezdícího robota POKUD (...
to bude fungovat...)
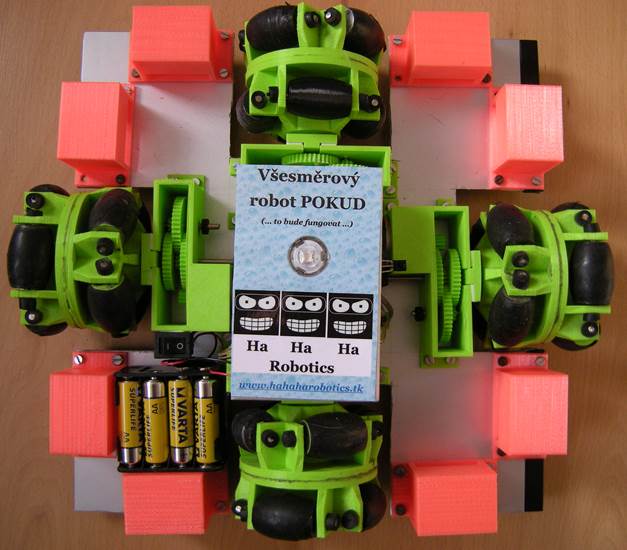
Popis výrobku
Řídící deska pro
všesměrově jezdícího robota je založená na mikrokontroléru PIC18F26K22, který
spíná
2 motorové drivery L293D, které ovládají obousměrný pohyb 4 DC motorů robota.
Volné piny mikrokontroléru jsou vyvedeny na samostatné konektory, které umožní
budoucí připojení externích senzorů a výstupů robota, např.:
-
Narážecí
tlačítka
-
Enkodéry
-
Ultrazvukové
nebo infračervené dálkoměry
-
Akcelerometry
-
Elekronický
kompas
-
Smart
RGB LED
-
Dálkové
ovládání infračerveným ovladačem (přes senzor TSOP4838 na desce) nebo Bluetooth
Deska může být napájena bateriemi nebo akumulátory 6 –
13 V DC, obsahuje odporový dělič pro měření napětí baterie a 5V
stabilizátor MCP1702 pro napájení mikrokontroléru a driverů.
Mechanické díly robota jsme vytiskli z PLA 3D
tiskárnou Prusa i3 z modelů stažených z www.thingiverse.com:
http://www.thingiverse.com/thing:3575
(ozubená kola převodovky)
http://www.thingiverse.com/thing:705
(všesměrová kola).
Nosná deska robota byla
vyřezána z krytu tiskárny Canon Pixma.
Mikrokontrolér obsahuje jednoduchý program, který
ovládá pohyb robota dopředu, dozadu, doleva, doprava, rotací doleva, rotací
doprava, 4 šikmými směry, v 2sekundových intervalech, se současným
přepínáním SmartRGB LED. Ovladače pro mikrokontrolér a Smart RGB mi
naprogramoval můj bratr Michal.
Tabulka součástek
|
Kód
|
Typ
|
Parametry
|
Funkce
|
|
C1
|
Kondenzátor
keramický
|
100
nF / 50V X7R
|
Filtrace
napájení PIC
|
|
C2
– C5
|
Kondenzátor
keramický
|
100
nF / 50 V X7R
|
Filtrace
napájení driverů
|
|
C6
|
Kondenzátor
elektrolytický
|
100
µF / 25 V
|
Filtrace
zdroje
|
|
C7
|
Kondenzátor
tantalový
|
10µF
/ 25 V
|
Filtrace
vstupu stabilizátoru
|
|
C8
|
Kondenzátor
tantalový
|
10µF
/ 25 V
|
Filtrace
výstupu stabilizátoru
|
|
C9
|
Kondenzátor
keramický
|
100
nF / 50V X7R
|
Filtrace
napájení IR senzoru
|
|
D1
|
Dioda
|
UF4007
|
Ochrana
proti přepólování
|
|
FU1
|
Pojistka
polymerová
|
1,1
A
|
Ochrana
proti přepólování a nadproudu
|
|
IC1
|
Mikrokontrolér
|
PIC18F26K22
|
Řízení
motorů
|
|
IC2,
IC3
|
Motorové
drivery
|
L293D
|
Obousměrné
spínání 4 DC motorů
|
|
IC4
|
Stabilizátor
|
MCP1702-5000
|
Zdroj
5V pro napájení PIC, driverů a IR senzoru
|
|
IC5
|
IR
senzor
|
TSOP4838
|
Dálkové
ovládání robota
|
|
ICSP
|
Pájecí
piny
|
|
Programování
PIC18F26K22
|
|
IDC10
|
IDC
konektor
|
IDC10
|
Připojení
externích senzorů
|
|
K1
|
Svorkovnice
|
ARK500/2
|
Připojení
zdroje
|
|
M1
- M4
|
Svorkovnice
|
ARK500/2
|
Připojení
motorů
|
|
R1
– R12
|
Rezistor
|
1
kΩ / 0,6 W
|
Ochrana
vstupů driverů
|
|
R13
|
Rezistor
|
3k3/
0,25W
|
Odporový
dělič pro měření baterie
|
|
R14
|
Rezistor
|
5k6/
0,25 W
|
Odporový
dělič pro měření baterie
|
|
R15
|
Rezistor
|
100
Ω /0,6 W
|
Filtrace
napájení IR senzoru
|
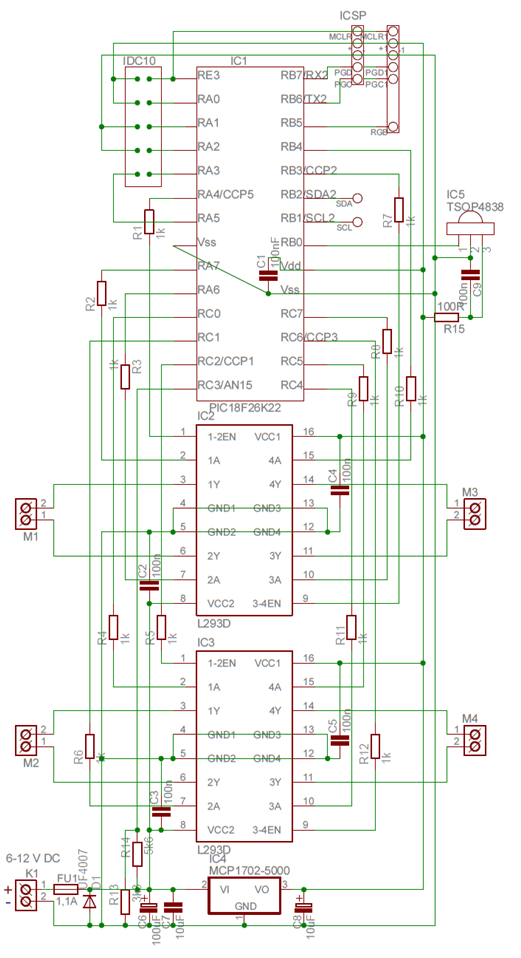
Funkční schéma
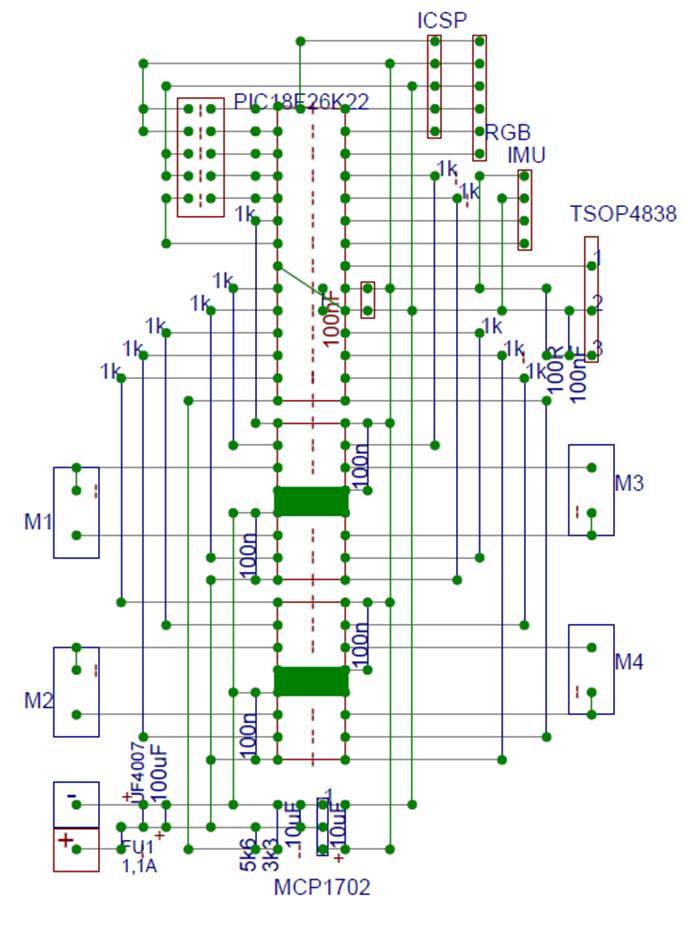
Pájecí schéma
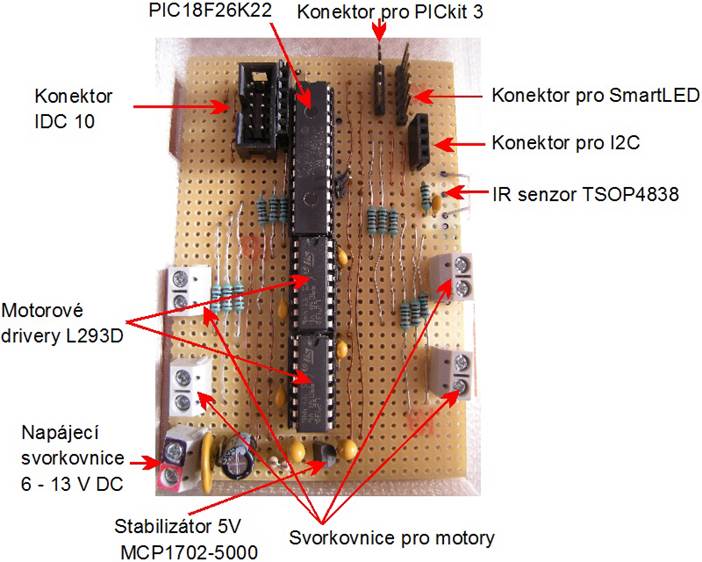
Fotografie strany součástek
Fotografie strany spojů
Program

