Béda 6 – a robot for the Ketchup House competition
Video
A winning home-made robot for the Ketchup House competition at the Robotic Day 2016 in Prague.
Everything worked better than expected and we won it over 10 other robots. The
robot is a refurbished version of an older robot Béda 5 made for the RoboRAVE 2016 competition – Junior
category (…which it won as well…). It uses mechanical parts, power system,
geared motors, control board and sensors of original Béda 5, we just exchanged a top ball-collector for a front
steel ploughshare and IR distance sensor with push-buttons for ultrasonic
sensor (rotating on a servo for an opponent detection).
Function
In the Ketchup House competition, two autonomous
robots try to gather up to 12 ketchup cans on a playing field composed of a
7x7 black line grid and place them on their home lines. The robot cannot push
the opponent out of the playing field but it can seize the cans from the
opponent´s home line. The robot collecting more cans than the opponent in a
3-minute time limit is a winner.
Description
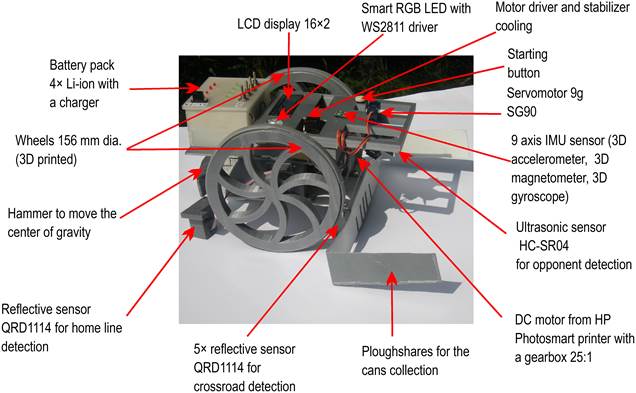
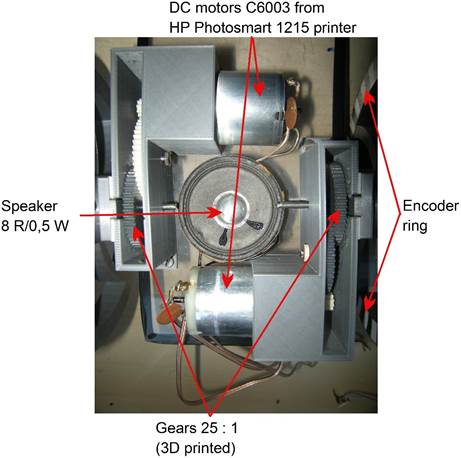
Béda
6 uses DC motors salvaged from HP
Photosmart 1215 printer, mechanical parts incl. gears and wheels printed on a
3D printer, control system based on own PCB with PIC16F1789, bidirectional
motor driver L298N (2x 2A), alphanumeric LCD display 16x2, RGB LED with WS2811
driver, 6 reflective sensors QRD1114 for following the black lines on the 7 x 7
playfield. Ultrasonic distance sensor HC-SR04 rotating on a servo-motor SG9z serves
for the opponent detection on the field. The robot is equipped with 9D position
sensor MinIMU-9 (3D accelerometer, 3D magnetometer and 3D gyroscope) from
Pololu company, but the sensor was not finally used in the program. The robot is
powered by a battery pack with 4 Li-ion 18650 accumulators 2.2 Ah charged with
a chip MCP73831.
Mechanical parts
- main wheels: Ø156 mm 3D printed at PRUSA i3, material
PLA, a modified parametric model from http://www.thingiverse.com/thing:21486
- stabilizing ball wheel: ping – pong ball in a holder, 3D
printed at PRUSA i3, material PLA, a model taken from http://www.thingiverse.com/thing:636967
-
tires of the main wheels: a rubber sheet cut from an old
washing machine
- chassis: polycarbonate sheet 120 × 250 mm from a HP DeskJet
printer
- 2×gearbox 25:1, 3D printed at PRUSA i3, material PLA, a
modified parametric model from http://www.thingiverse.com/thing:3575
- holder of reflective sensors: 3D printed at PRUSA i3,
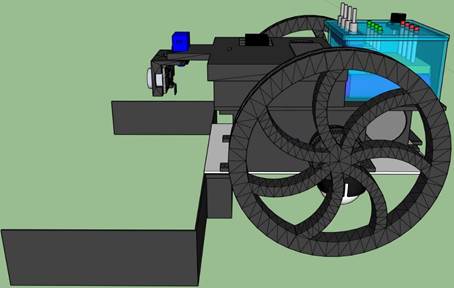
material PLA, own design (see the SketchUp model below)
- the control board case with a lid: 3D printed at PRUSA i3,
material PLA, own design (see the SketchUp model below)
- the battery pack box with lid: 3D printed at PRUSA i3,
material PLA, own design (see the SketchUp model below)
- holder of ultrasonic distance sensor: 3D printed at PRUSA i3,
material PLA, own design (see the SketchUp model below)
Electrical parts
-
MCU: PIC16F1789
-
MCU inputs:
·
5×reflective sensor
QRD1114 for the black line
following and crossroad detection
·
1×back reflective sensor QRD1114 for home line detection
·
1×reflective sensor QRD1114 for a wheel encoder
·
9-axis IMU sensor MinIMU-9 for robot orientation on the field
·
ultrasonic distance sensor HC-SR04 for opponent detection
-
MCU outputs:
·
alphanumeric LCD display 16x2
·
bidirectional motor driver L298N (2×2 A)
·
RGB LED with a driver WS2811 for signalization
·
servomotor 9g
SG90 for ultrasonic distance sensor
rotation
·
speaker 8
Ω/0,5 W for playing the winning songs
-
Motors: 2 DC
motors C6003 salvaged from HP Photosmart 1215 printer
-
Battery pack: 4×Li-ion acumulators 3.6 V/2.2 Ah, separately
charged via MCP73831 chips
-
PCB: universal line PCB e=0.1“
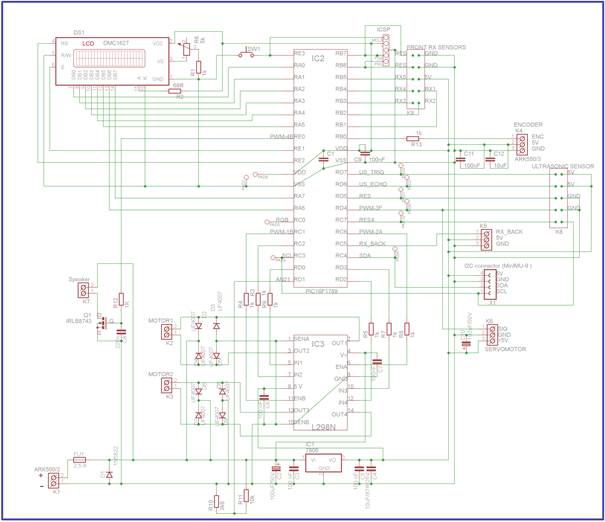
Control board - functional scheme
Control board - soldering scheme
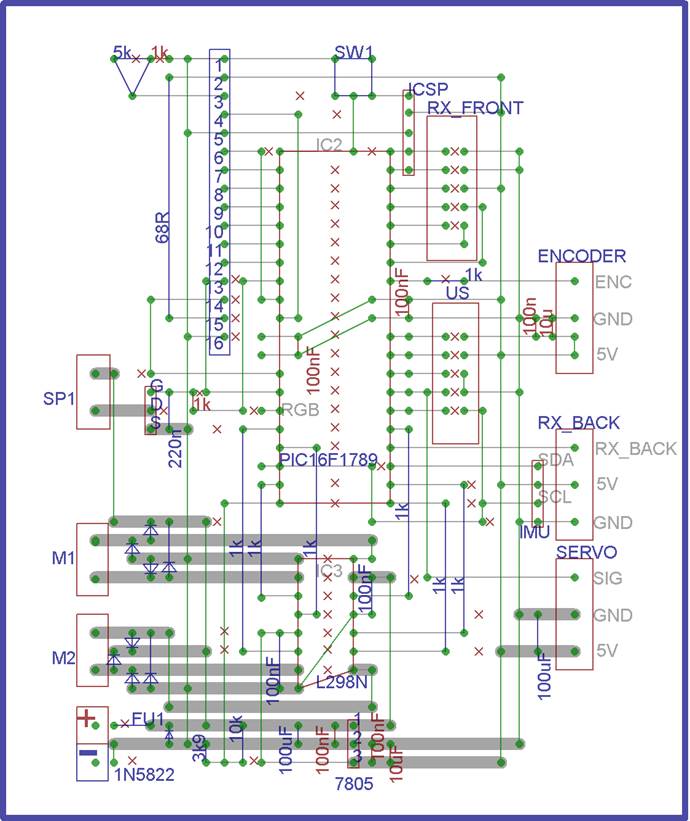
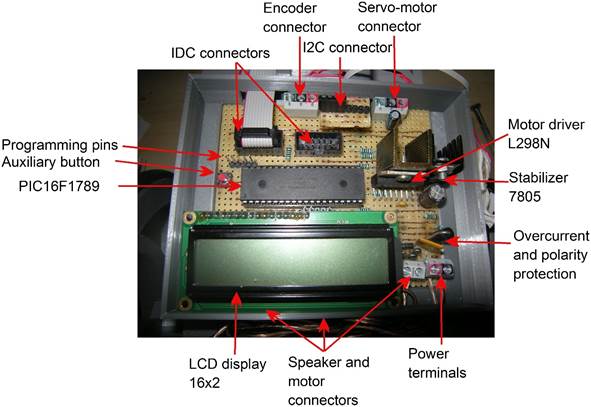
Table of components - Control board
|
Code
|
Type
|
Parameters
|
Function
|
|
C1
|
capacitor
|
ceramic 100
nF SMD 0805
|
MCU power
filter
|
|
C2
|
capacitor
|
electrolytic
100 µF/50 V
|
7805 input
filter
|
|
C3
|
capacitor
|
ceramic 100
nF SMD 0805
|
7805 input
filter
|
|
C4
|
capacitor
|
ceramic
10 µF /X7R/25
V SMD 0805
|
7805 output
filter
|
|
C5
|
capacitor
|
ceramic 100 nF
|
7805 output filtration
|
|
C6
|
capacitor
|
ceramic 100 nF
|
L298N power filtration
|
|
C7
|
capacitor
|
ceramic 100 nF
|
L298N power filtration
|
|
C8
|
capacitor
|
ceramic 220 nF
|
speaker input RC filter
|
|
C9
|
capacitor
|
ceramic 100 nF SMD 0805
|
MCU power filter
|
|
C10
|
capacitor
|
electrolytic
100 µF /50 V
|
servo motor
power filter
|
|
C11
|
capacitor
|
ceramic 100 nF SMD 0805
|
encoder input filtration
|
|
C12
|
capacitor
|
ceramic 10 µF SMD 0805
|
encoder input filtration
|
|
D1
|
diode
|
1N5822
|
polarity
protection
|
|
D2 -D9
|
diode
|
UF4007
|
L298N output
protection
|
|
DS1
|
LCD display
|
alphanumeric
16x2
|
setting and
displaying program parameters
|
|
FU1
|
polymer fuse
|
2.5 A
|
overcurrent
and polarity protection
|
|
IC1
|
stabilizer
|
7805
|
5V power
source
|
|
IC2
|
MCU
|
PIC16F1789
|
microcontroller
|
|
IC3
|
motor driver
|
L298N
|
bidirectional
motor driver 2x2 A
|
|
|
programming pins
|
ICSP
|
programming
pins to MCU
|
|
IMU
|
positional sensor
|
MinIMU-9
|
robot orientation on the field
|
|
K1
|
terminal
|
ARK500/2
|
main power
connector
|
|
K2
|
terminal
|
ARK500/2
|
motor
connector
|
|
K3
|
terminal
|
ARK500/2
|
motor
connector
|
|
K4
|
terminal
|
ARK550/3
|
reserve output connector
|
|
K5
|
terminal
|
ARK550/3
|
back RX connector
|
|
K6
|
terminal
|
ARK550/3
|
servomotor connector
|
|
K7
|
terminal
|
ARK500/2
|
speaker connector
|
|
K8
|
connector
|
IDC10
|
ultrasonic distance
sensor connector
|
|
K9
|
connector
|
IDC10
|
front reflective sensors
connector
|
|
MOTOR-MOTOR2
|
motors
|
DC motors
C6003 salvaged from a printer HP Photosmart 1215
|
robot wheel
drive
|
|
PAD1 – PAD10
|
soldering
pins
|
|
auxiliary
connectors for external inputs and outputs
|
|
Q1
|
transistor
|
IRLB8743
|
switching
speaker for sound generation
|
|
R1
|
resistor
|
1 kΩ
|
LCD display
contrast setting
|
|
R2
|
resistor
|
68 Ω
|
LCD display
background light
|
|
R3
|
resistor
|
1 kΩ
|
L298N input
protection
|
|
R4
|
resistor
|
1 kΩ
|
L298N driver
protection
|
|
R5
|
resistor
|
1 kΩ
|
L298N driver
protection
|
|
R6
|
trimmer
|
5 kΩ
|
LCD display
contrast setting
|
|
R7
|
resistor
|
1 kΩ
|
L298N input
protection
|
|
R8
|
resistor
|
1 kΩ
|
L298N input
protection
|
|
R9
|
resistor
|
1 kΩ
|
L298N input
protection
|
|
R10
|
resistor
|
3.9 kΩ
|
voltage
divider for battery control
|
|
R11
|
resistor
|
10 kΩ
|
voltage
divider for battery control
|
|
R12
|
resistor
|
1 kΩ
|
sound RC
filter
|
|
R13
|
resistor
|
1 kΩ
|
MCU analog
input protection
|
|
RGB
|
RGB LED
|
HC-F5V-F20-WS2811, SMART
RGB with WS2811 driver
|
program status
signalization
|
|
SERVO MOTOR
|
servo motor
|
9 g SG9z
|
ultrasonic
sensor rotation
|
|
Speaker
|
speaker
|
8 Ω/0,5 W
|
acoustic
signalization
|
|
SW1
|
button
|
button to PCB
|
auxiliary button
(reserve)
|
|
US1
|
ultrasonic distance
sensor
|
HC-SR04
|
opponent
detection
|
|
X1
|
4x header
|
|
I2C
communication connector
|
Scheme - reflective sensors
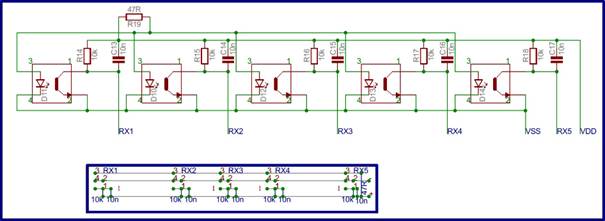
PCB with reflective sensors
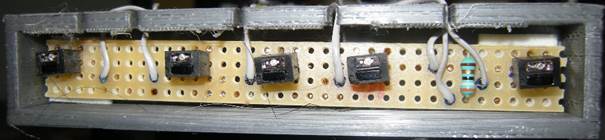
Table of components - Reflective sensors
|
Code
|
Type
|
Parameters
|
Function
|
|
C13 – C17
|
capacitor
|
ceramic 10 nF
SMD 0805
|
filtration of
phototransistor output
|
|
R14 – R18
|
resistor
|
10 kΩ
|
phototransistor
output resistors
|
|
R19
|
resistor
|
47 Ω
|
current
limitations for LED diodes of reflective sensors
|
|
RX1 – RX5
|
reflective
sensors
|
QRD1114
|
track
detection
|
Scheme - reflective sensor and encoder
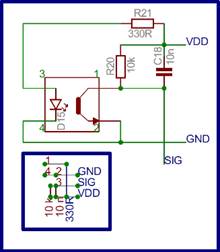
Table of components - back reflective sensor and encoder
|
Code
|
Type
|
Parameters
|
Function
|
|
C18
|
capacitor
|
ceramic 10 nF
SMD 0805
|
phototransistor
output filter
|
|
R20
|
resistor
|
10 kΩ
|
phototransistor
output resistor
|
|
R21
|
resistor
|
330 Ω
|
current
limitation for LED diode of the reflective sensor
|
|
RX_BACK
|
reflective sensor
|
QRD1114
|
home line detection or wheel
encoder
|
Wheel encoder

Scheme - Battery pack
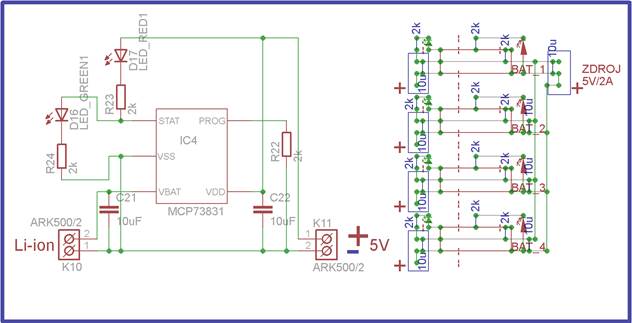
Battery pack - scheme of the switches connection
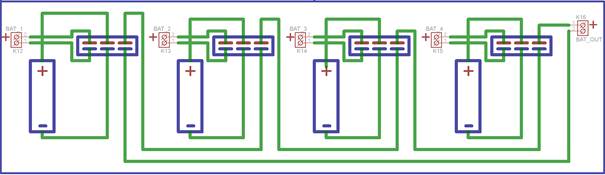
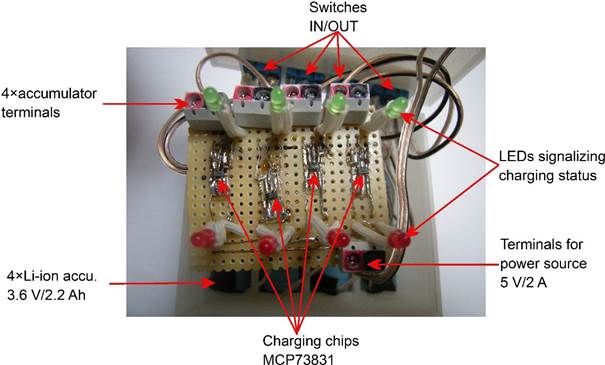
Table of components - Battery pack
|
Code
|
Type
|
Parameters
|
Function
|
|
C21
|
capacitor
|
4x ceramic 10
µF/25V SMD 1210
|
charging chip
output filtration
|
|
C22
|
capacitor
|
4x ceramic 10
µF/25V SMD 1210
|
charging chip
filtration
|
|
D16
|
LED diode
|
green
indication LED
3 mm/ 2 mA
|
indication of
charging status
|
|
D17
|
LED diode
|
red
indication LED
3 mm/ 2 mA
|
indication of
charging status
|
|
IC4
|
integrated
circuit
|
4x MCP73831
|
charging of a
single-cell Li-ion battery
|
|
K10
|
terminal
|
4x ARK500/2
|
Li-ion
accumulator connectors
|
|
K11
|
terminal
|
ARK500/2
|
power source
connector
|
|
R22
|
resistor
|
2 kΩ
|
LED current
limiting
|
|
R23
|
resistor
|
2 kΩ
|
LED current
limiting
|
|
R24
|
resistor
|
2 kΩ
|
charging current
selection
|
Battery pack photos




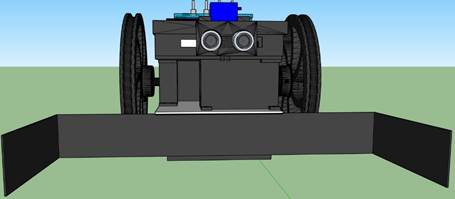
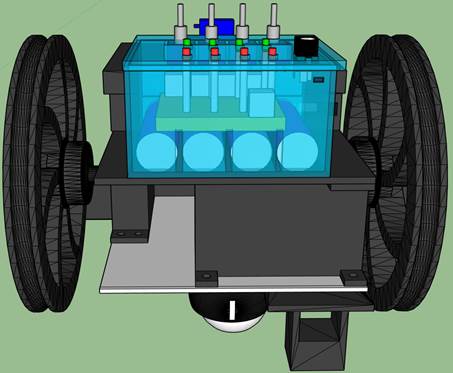
3D models in SketchUp
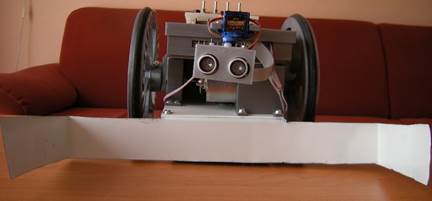
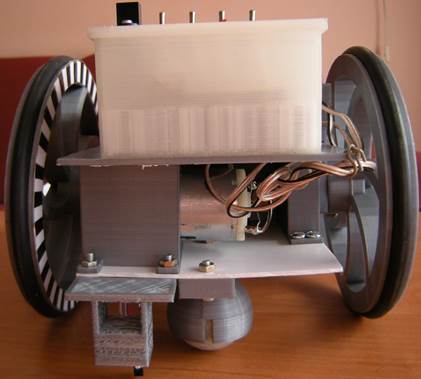
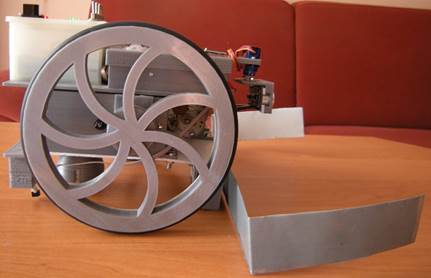
Photos of the robot


Motors
Files & Codes

