 Merkur perFEKT challenge 2016
Merkur perFEKT challenge 2016
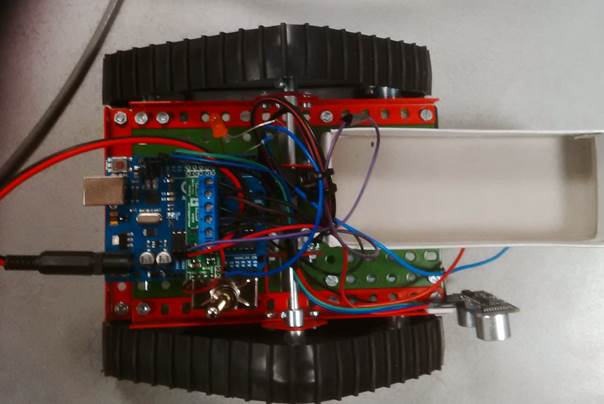
On 29th November we competed in Merkur perFEKT challenge at FEKT VUT Brno with other high school teams and we won the 1st place in Autonomous vehicle category. The task was to make, within 5.5 hour timeframe, an autonomous tracked vehicle using the following components: Merkur tracked chassis 01, Battery pack 6x1.2V NiMH, Pololu DRV8835 Dual Motor Driver, LED diode + resistor, Toggle switch, Micro switch,
Ultrasonic sensor HC-SR 04
 RoboRave Béda 5
RoboRave Béda 5
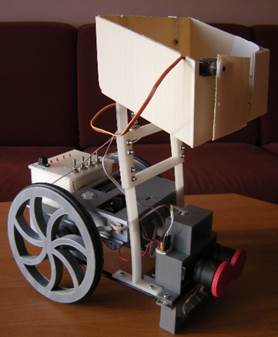
Robot jezdí po černé čáře, detekuje křižovatku, stiskává tlačítko u zásobovací věže, čímž nabere míčky do svého zásobníku, otočí se a jede směrem ke krabici, před ní se zastaví, vycentruje se, servomotorem otevře víko zásobníku míčků a vše vysype do krabice. Jestliže robotovi zbyde čas, otočí se znovu nabrat míčky k zásobovací věži, jinak se vrátí zpět na start.