 Řídící deska všesměrově jezdícího robota POKUD
Řídící deska všesměrově jezdícího robota POKUD
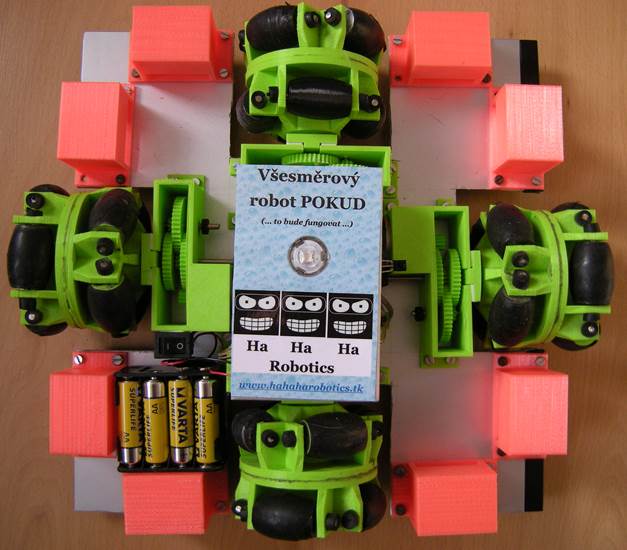
Řídící deska pro všesměrově jezdícího robota je založená na mikrokontroléru PIC18F26K22, který spíná
2 motorové drivery L293D, které ovládají obousměrný pohyb 4 DC motorů robota. Volné piny mikrokontroléru jsou vyvedeny na samostatné konektory, které umožní budoucí připojení externích senzorů a výstupů robota
