Description
Tractorbot Bobesh Mk2 is my second robot and it’s an upgrade of
Tractorbot Mk1
. It helped me to win two bronze medals this year at the national championship in electronics and radio-electronics of youth and at the
Czech Robotic Day
in Prague on 13th and14th June 2015 at the
Ketchup House contest
.
Functions:
-
IR remote controlled
-
Programmed for Ketchup House
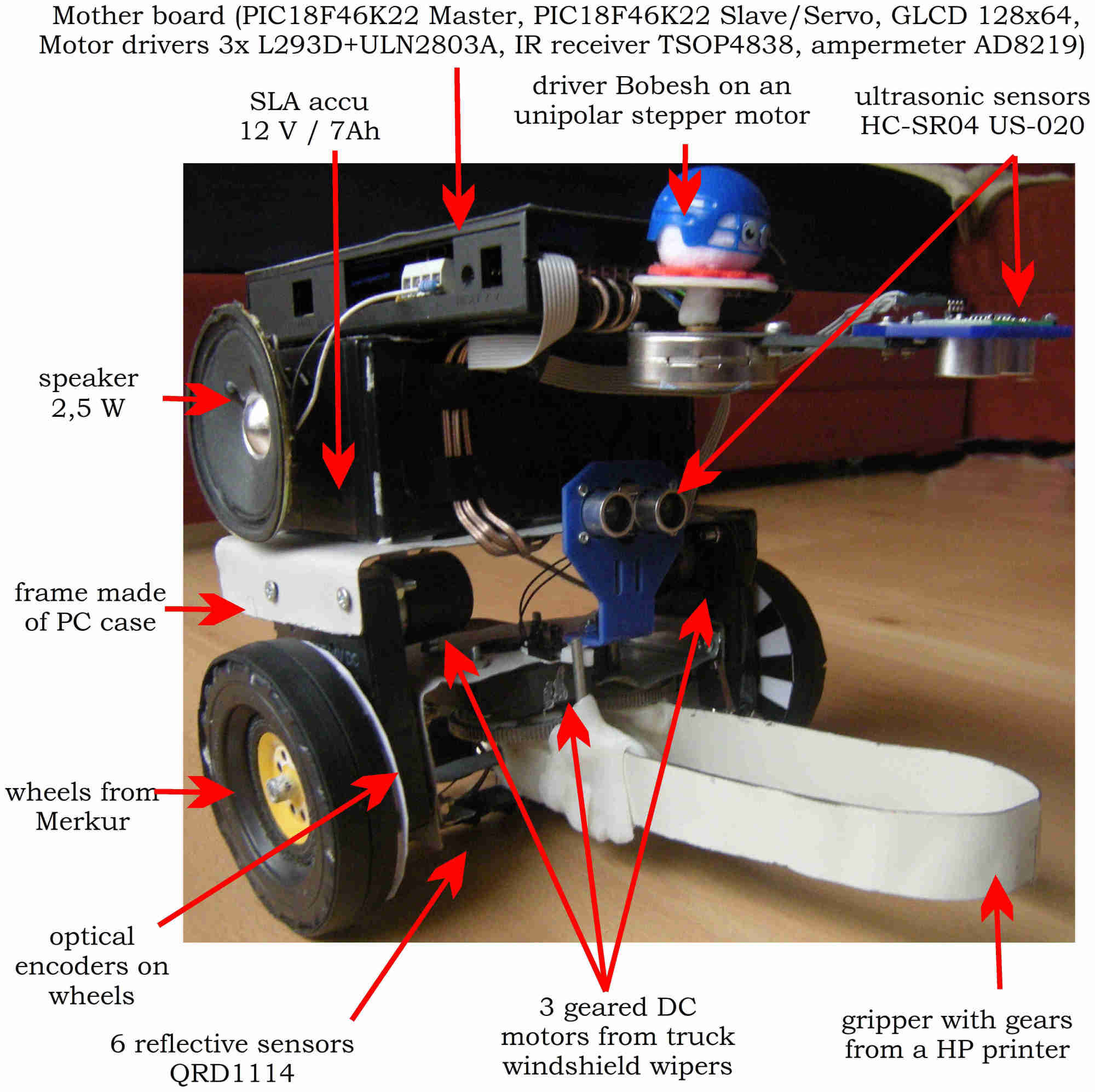
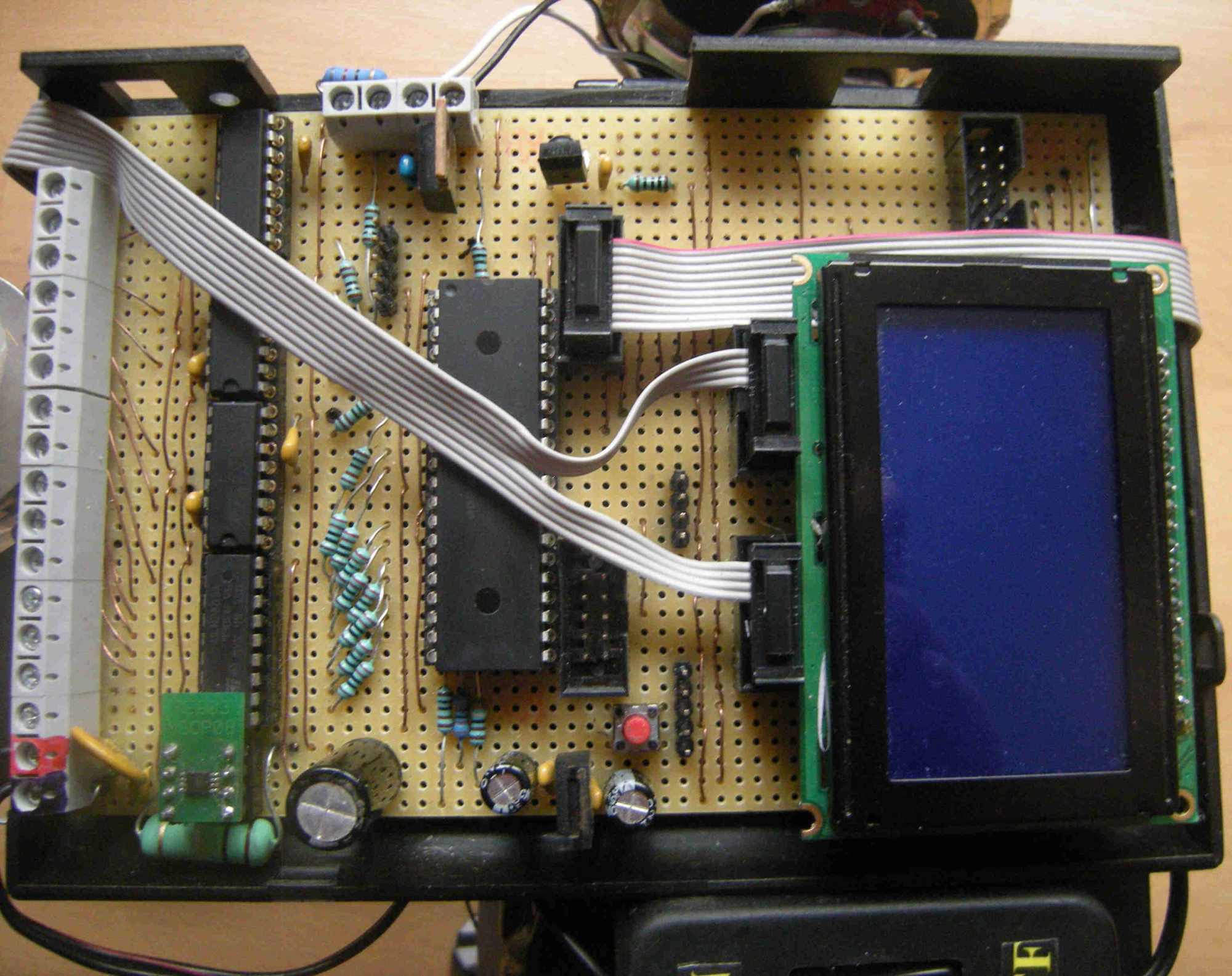
Home-made robotic control board with a “dual-core processor”:
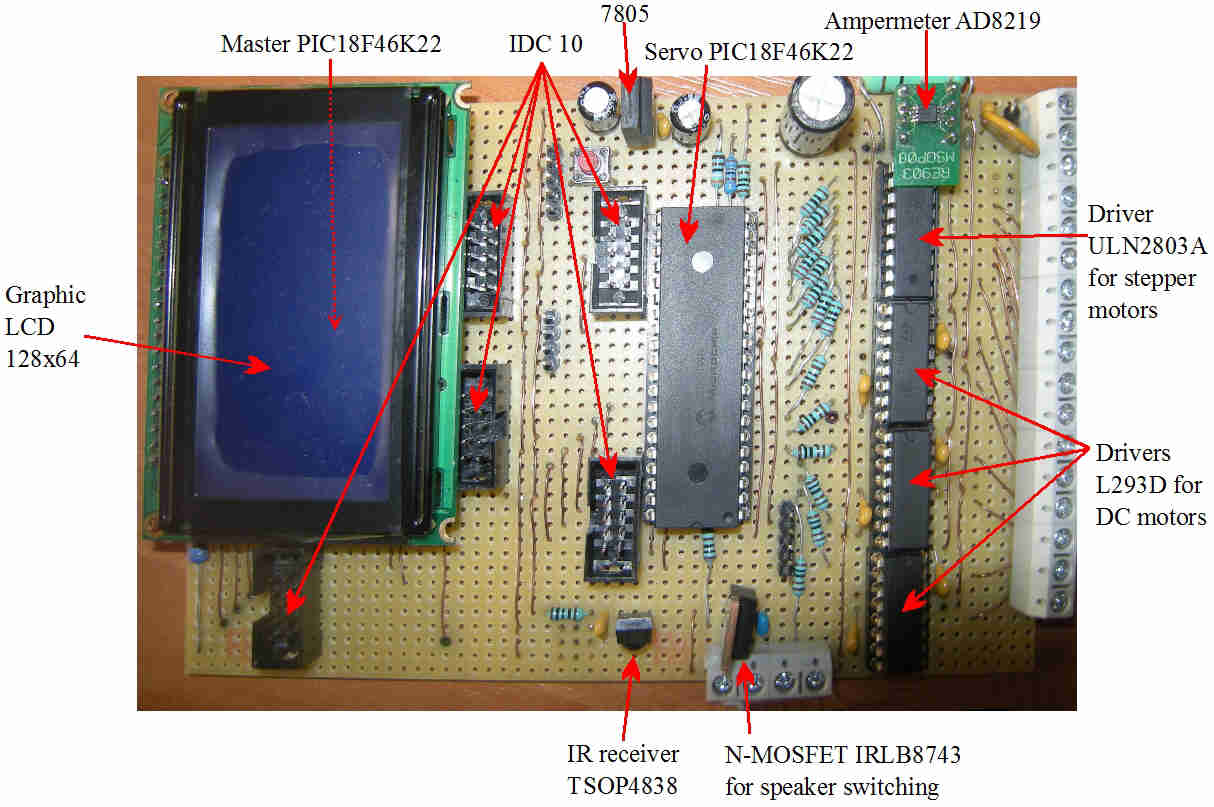
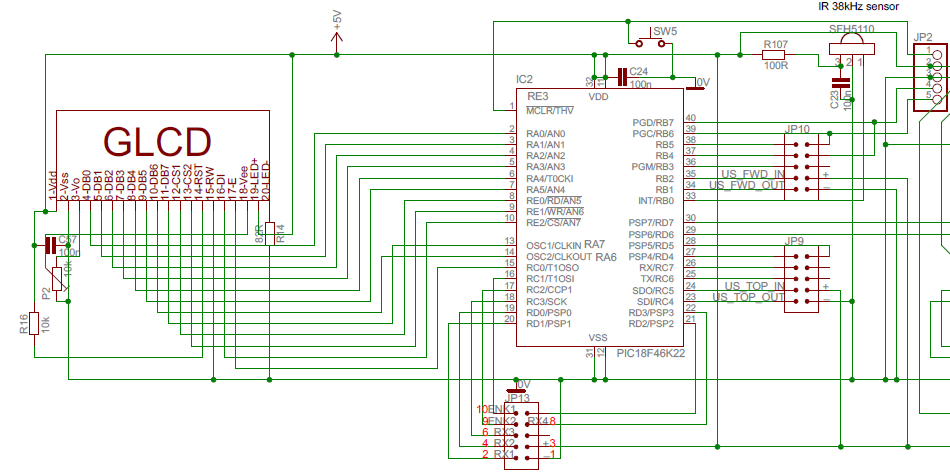
PIC18F46K22 as Master MCU
-
GLCD 128x64
-
IR-receiver for remote control systems SFH 5110-38
-
3x IDC 10-pin connectors with 20 free I/O pins of MCU (used to connect 3 external sensor boards)
-
UART communication with Slave MCU
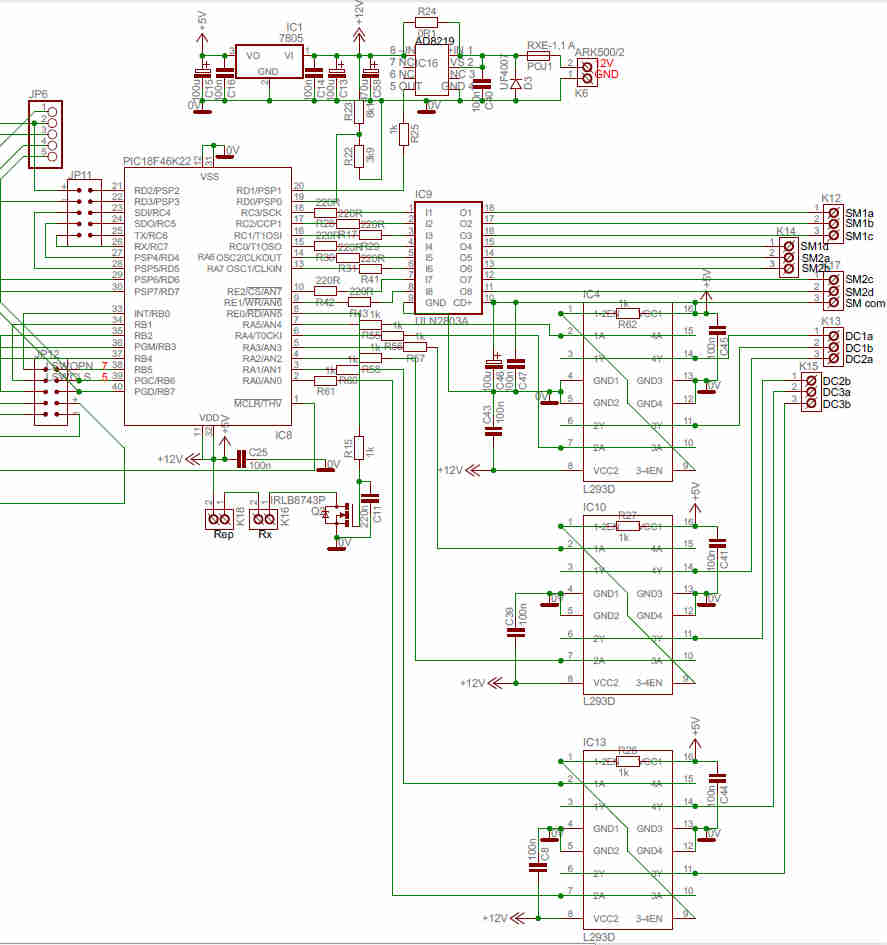
PIC18F46K22 as Slave/MultiServo MCU
-
3x motor driver L293D with paralleled outputs for 3 bidirectional DC motors (max 1.2 A each)
-
1x Motor driver ULN2803A for 2 unipolar stepper motors (0.5 A per phase each)
-
N-MOSFET IRLB8743 for speaker switching
-
Voltage divider for battery control
-
Digital ampermeter AD8219 for total current measurement
-
2x IDC 10-pin connectors with 16 free I/O pins of MCU (used to connect 2 mechanical limit switches)
Motors
:
-
3 geared motors salvaged from truck windshield wipers, originally for 24 VDC
2 motors for differential drive
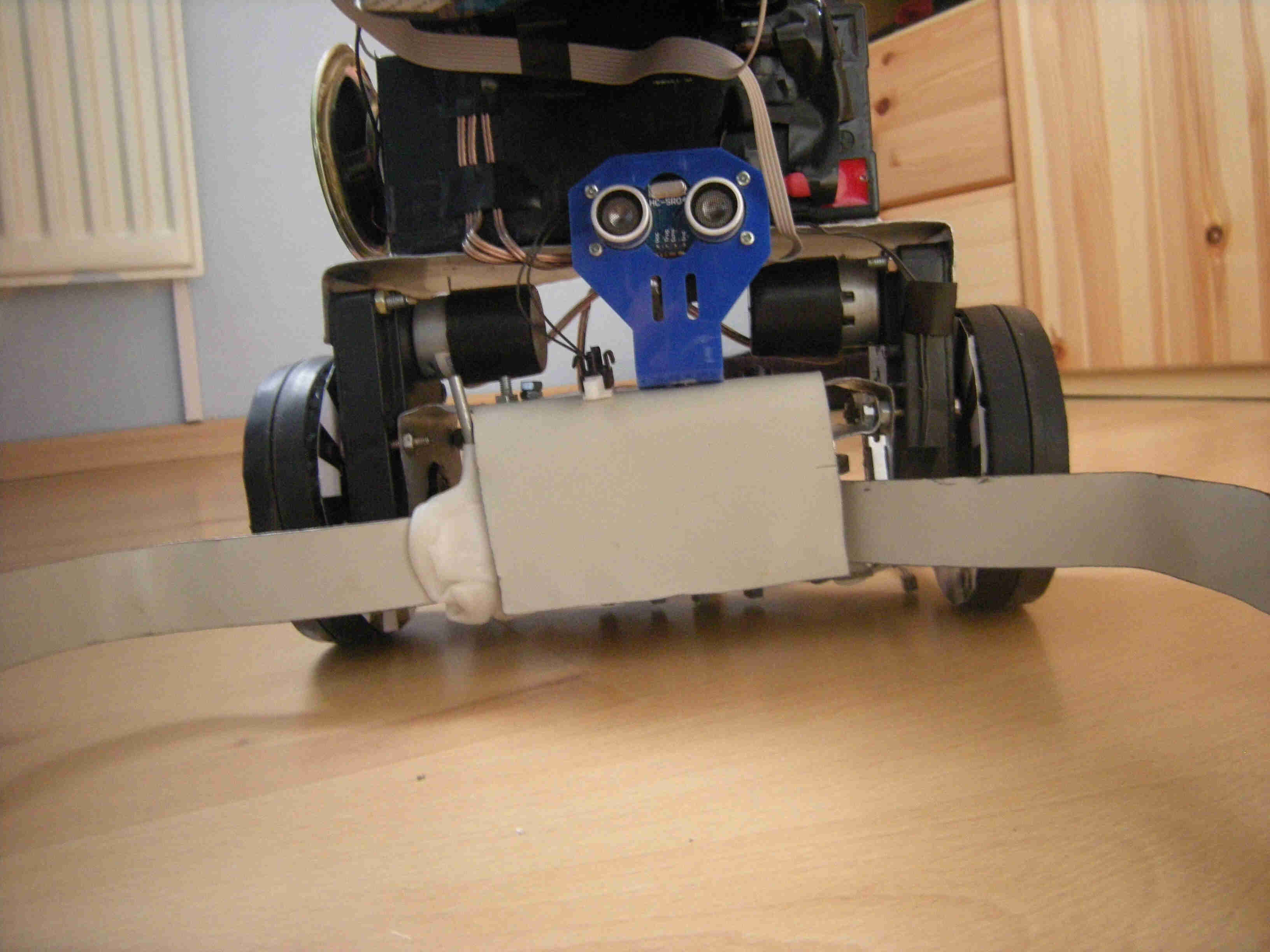
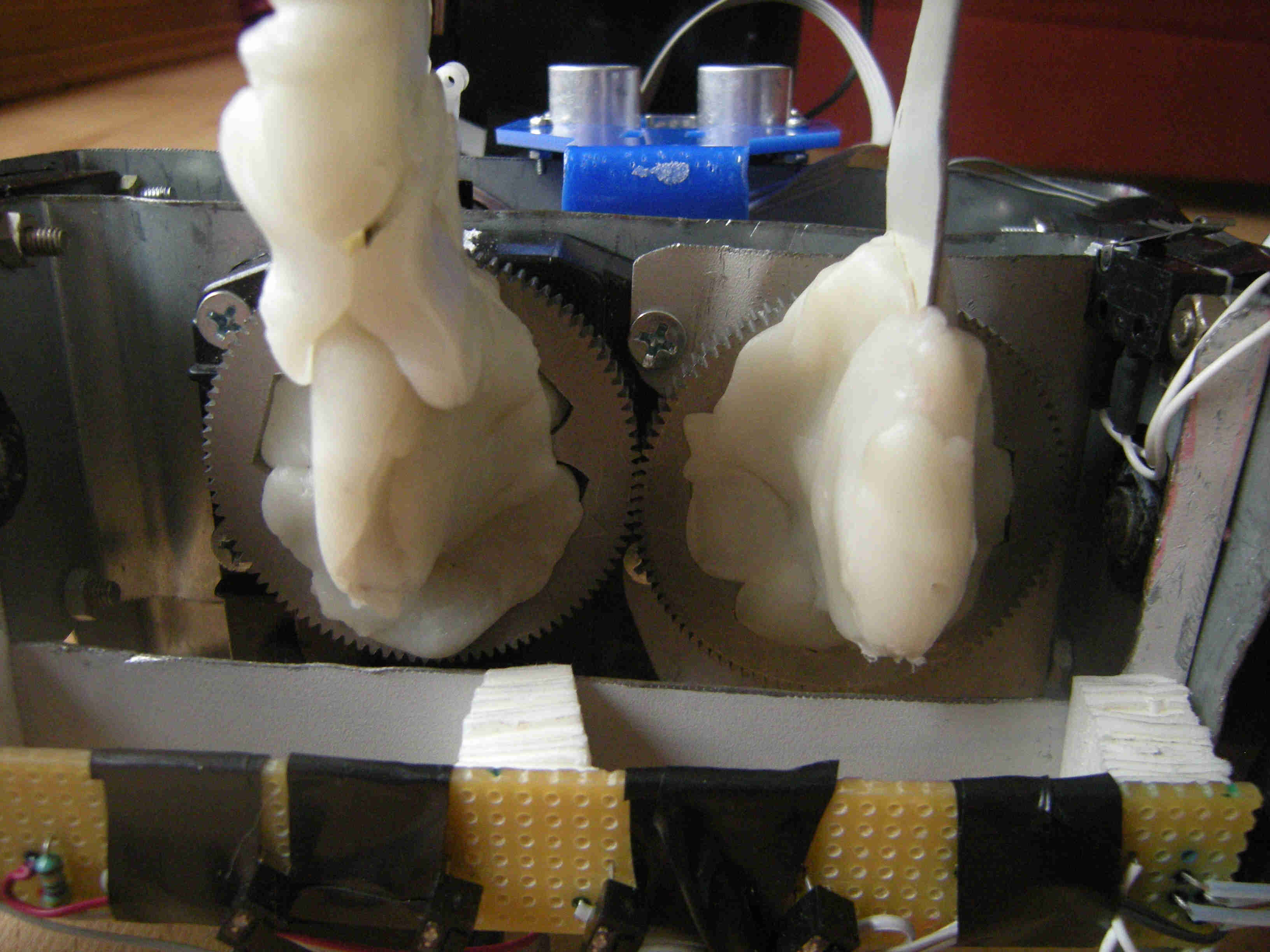
1 motor with a gear from HP DJ printer used for a gripper (finally not applied for collecting ketchup cans; fixed wide-open collector used instead)
-
one unipolar stepper motor from a printer (just for fun)
External sensors boards
:
-
ultrasonic ranging module HC-SR04 for an opponent detection
-
ultrasonic ranging module US-020 for ketchup can detection (finally not used)
-
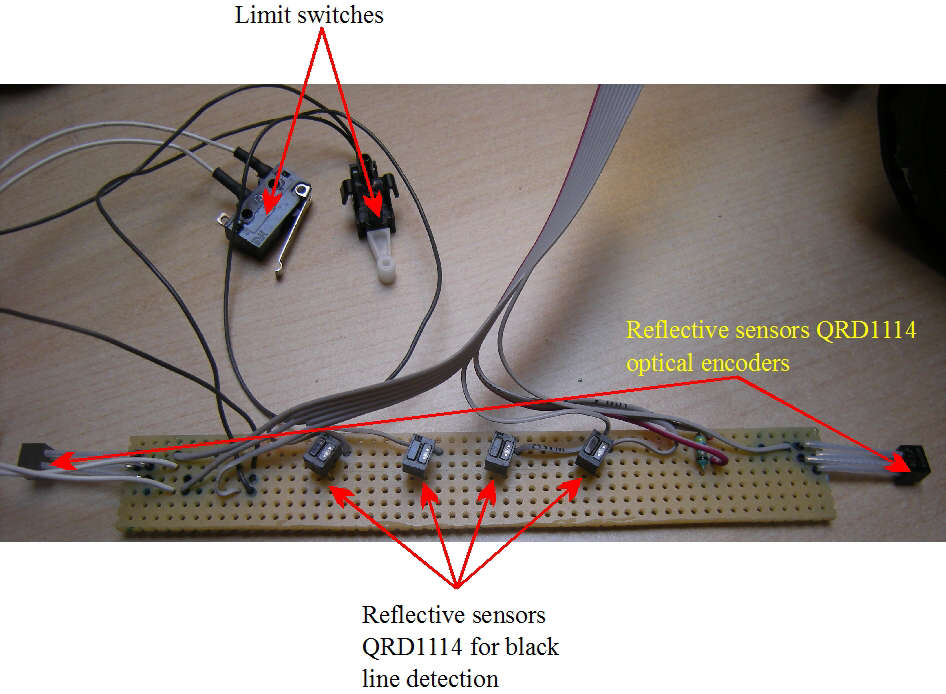
6x reflective object sensor QRD1114 (
5x black line detection +
1x optical encoder) + 2 mechanical limit switches
Power:
-
12 V SLA battery 7 Ah for motors and a speaker
-
7805 for MCU and sensors
Mechanical parts:
-
A frame made of PC case
-
Wheels from Merkur (Czech Meccano)
Posters
Robotic control board:
External sensor board:
Images
Front view:
Top view:

Bottom view on QRD1114 external board:

Bottom view on gripper gears:
Schemes
Functional scheme of the control board - Master part:
Functional scheme of the control board - Slave part:
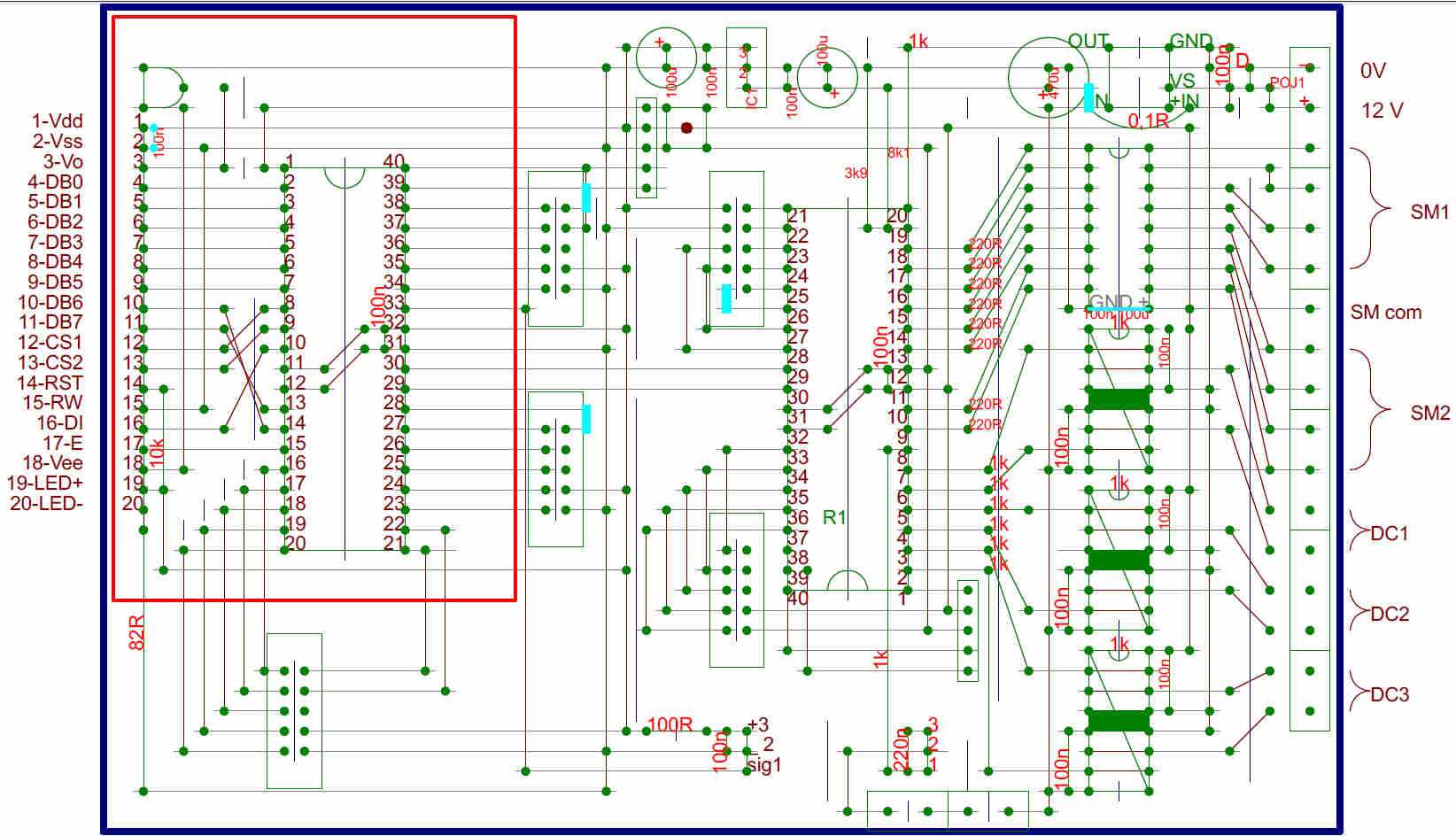
Soldering scheme of the control board on universal PCB (e=0.1"):
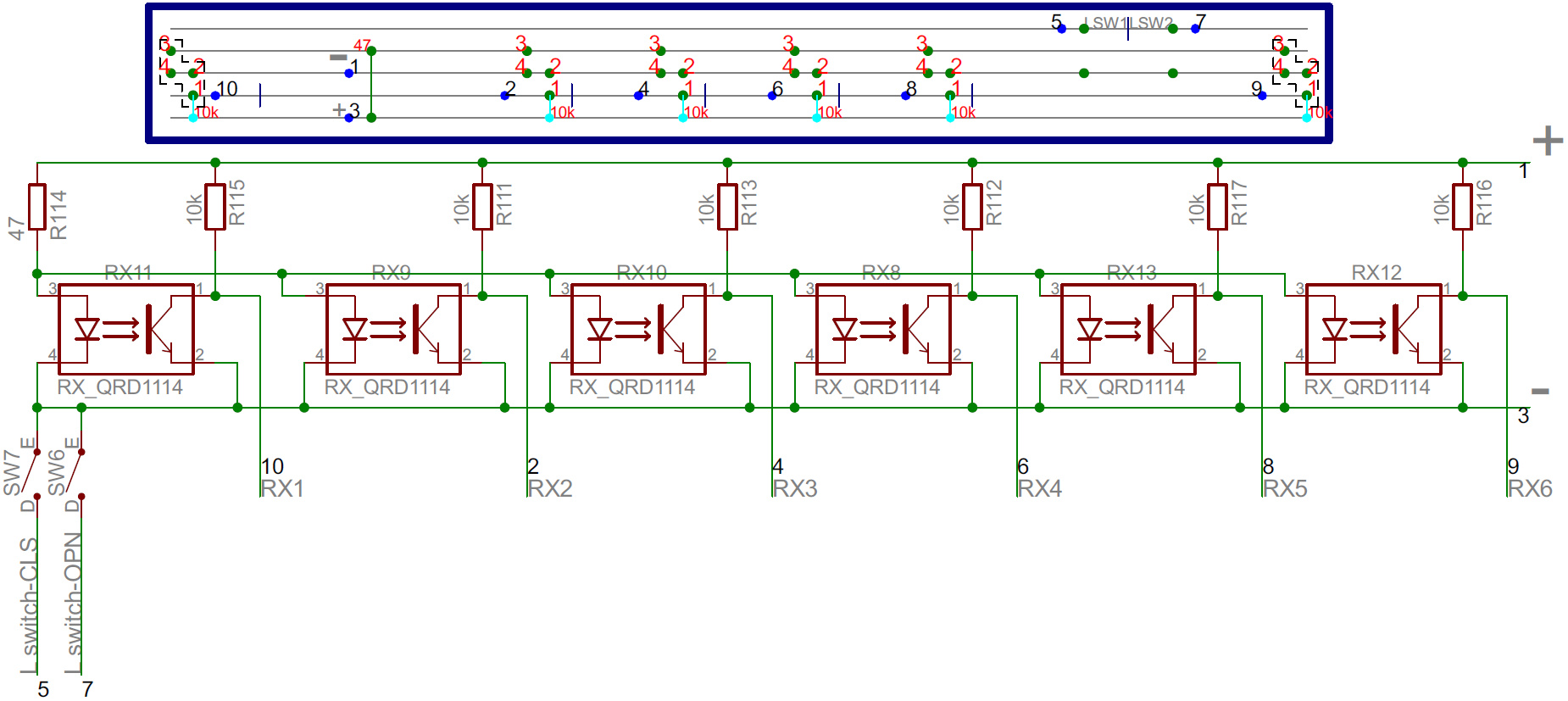
Scheme of the external sensor board:
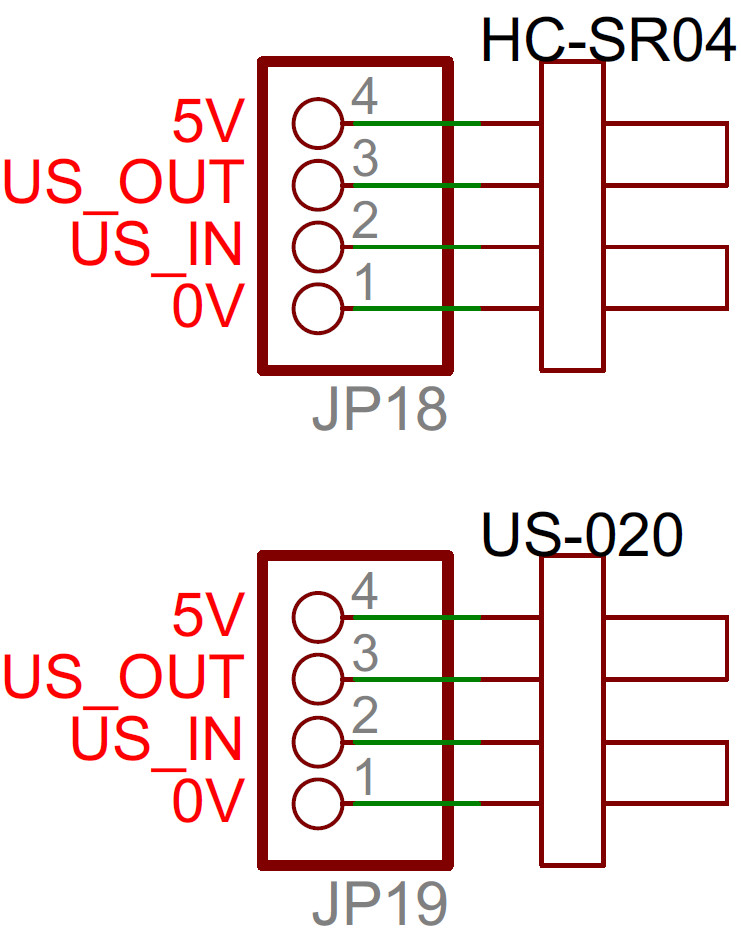
Scheme of the ultrasonic module:
What to improve in the next version of Tractorbot Mk3:
-
To double battery voltage to 24 V for increasing the robot´s speed.
-
To add an
electronic compass
for position control after getting lost in the playground.
-
To improve opponent detection by moving ultrasonic ranging module.

