Description
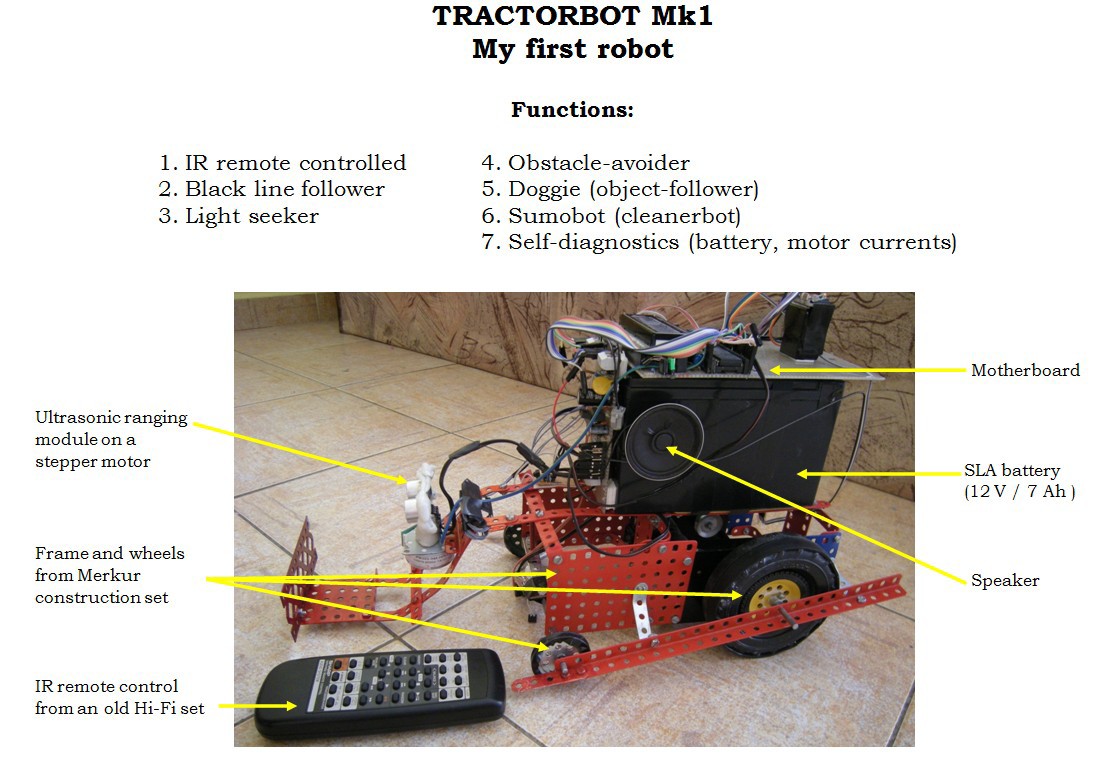
IR remote controlled, autonomous line follower, light seeker, sumobot, obstacle-avoider and obstacle-follower with PIC18F46K22
Characteristics:
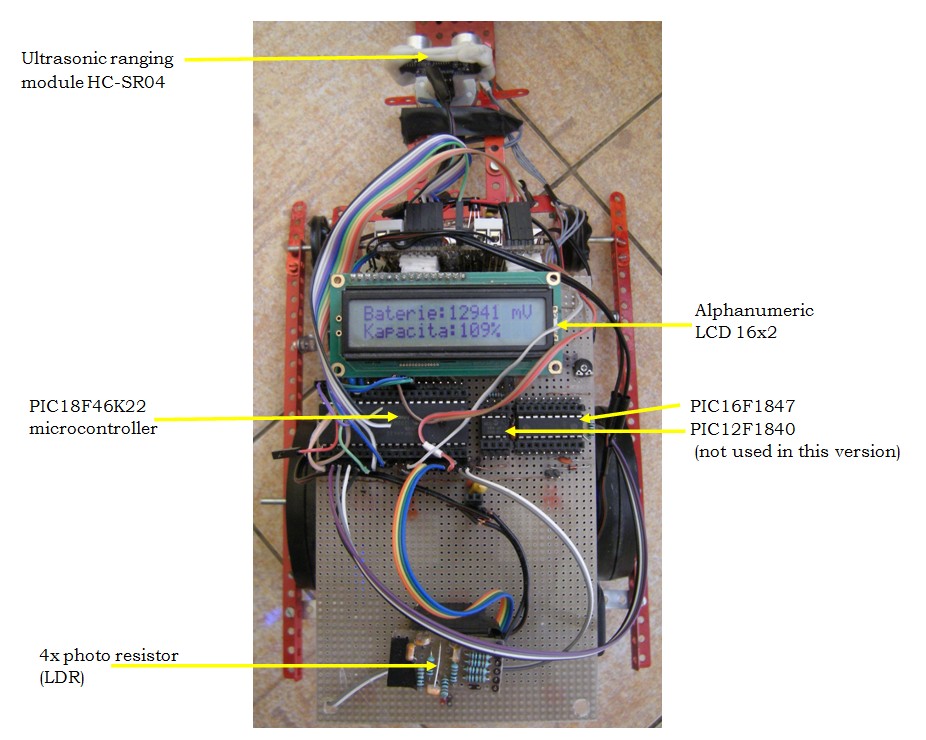
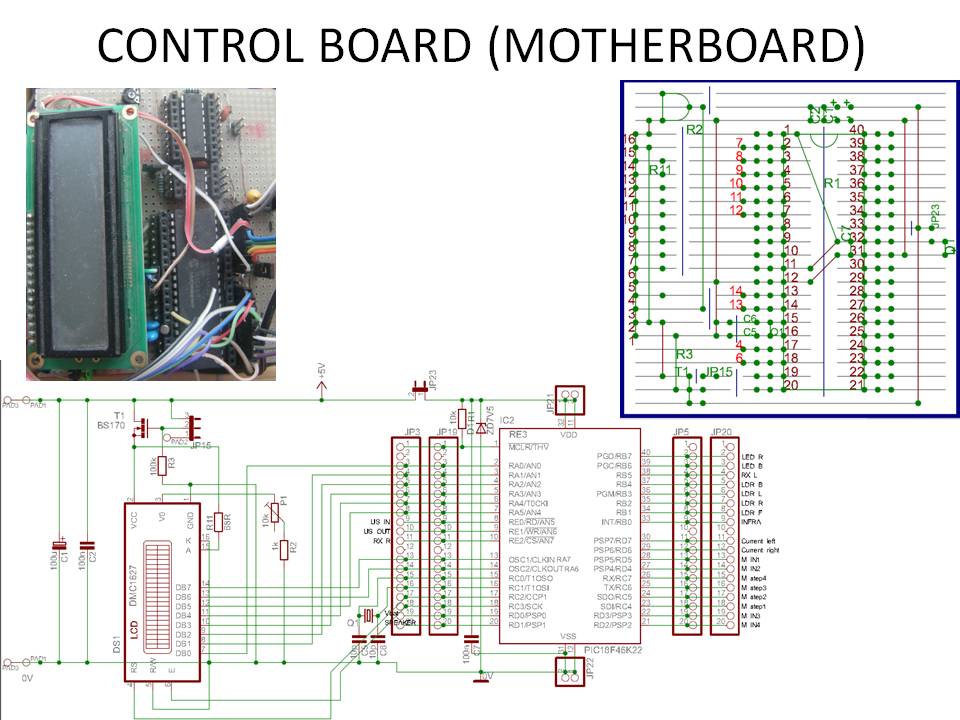
- MCU: PIC18F46K22
- Programming language: C (the code is attached)
- Power: SLA battery 12 V / 7 Ah
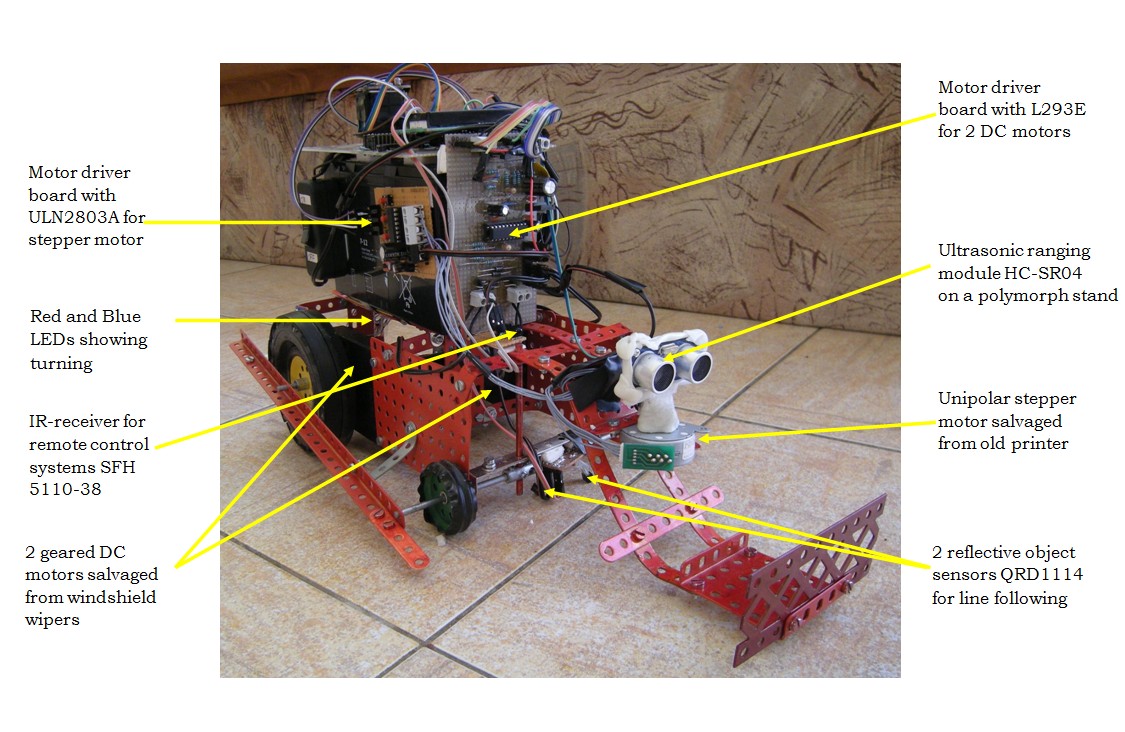
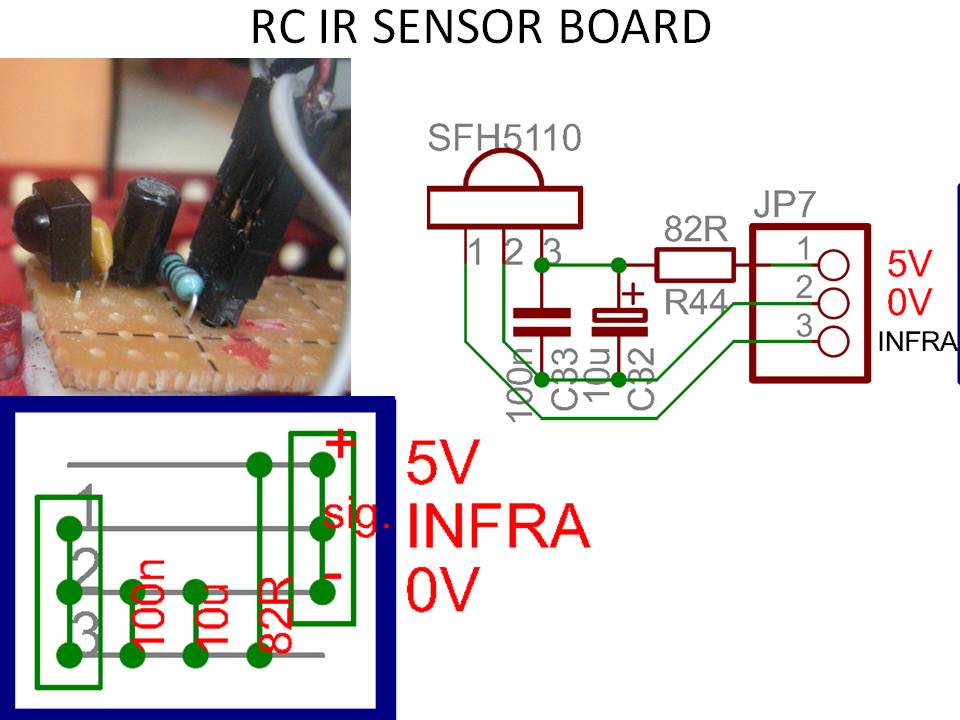
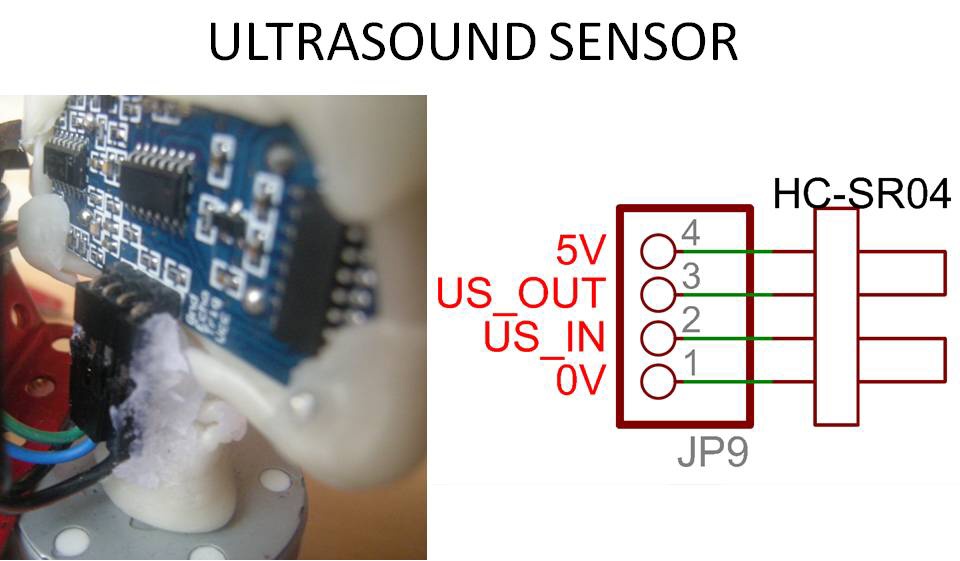
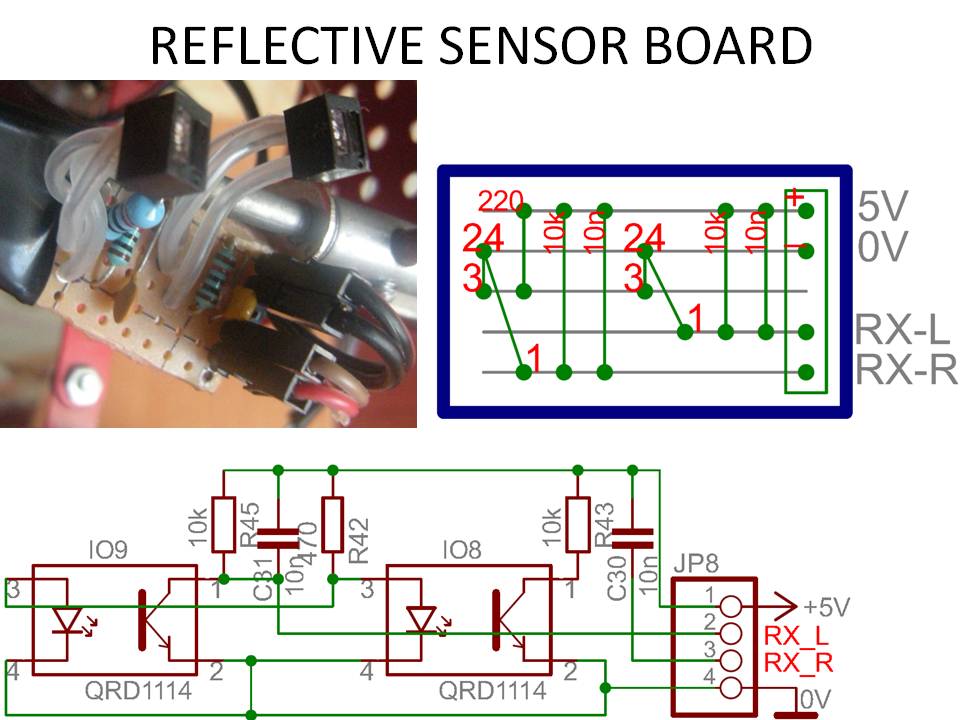
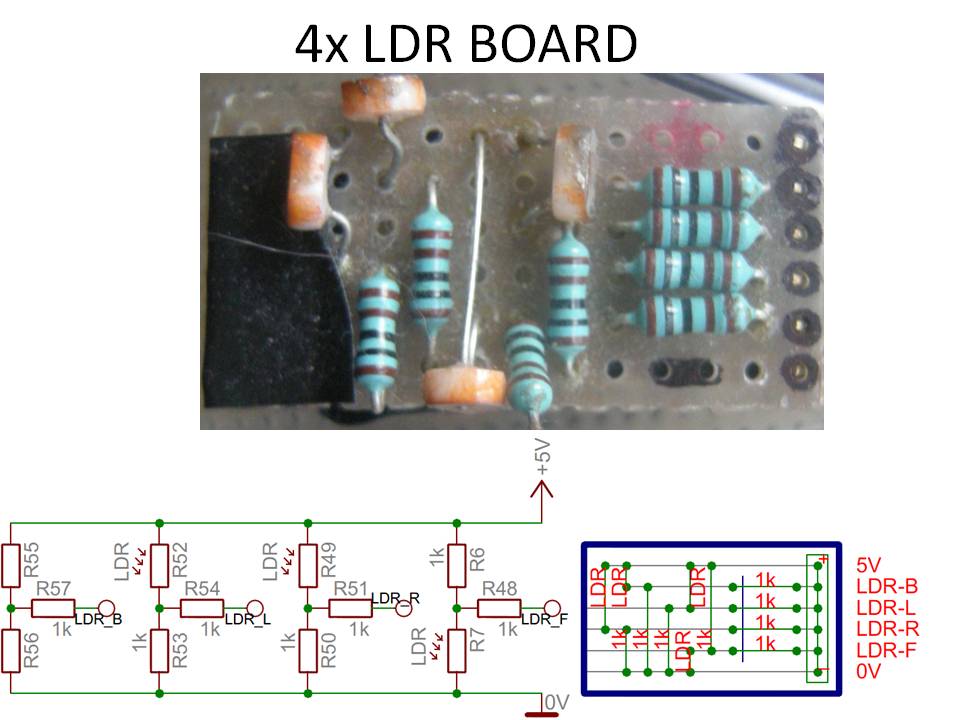
- Sensors: ultrasonic ranging module HC-SR04, IR-receiver for remote control systems SFH 5110-38, 2x reflective object sensor QRD1114, 4x LDR (photo resistor)
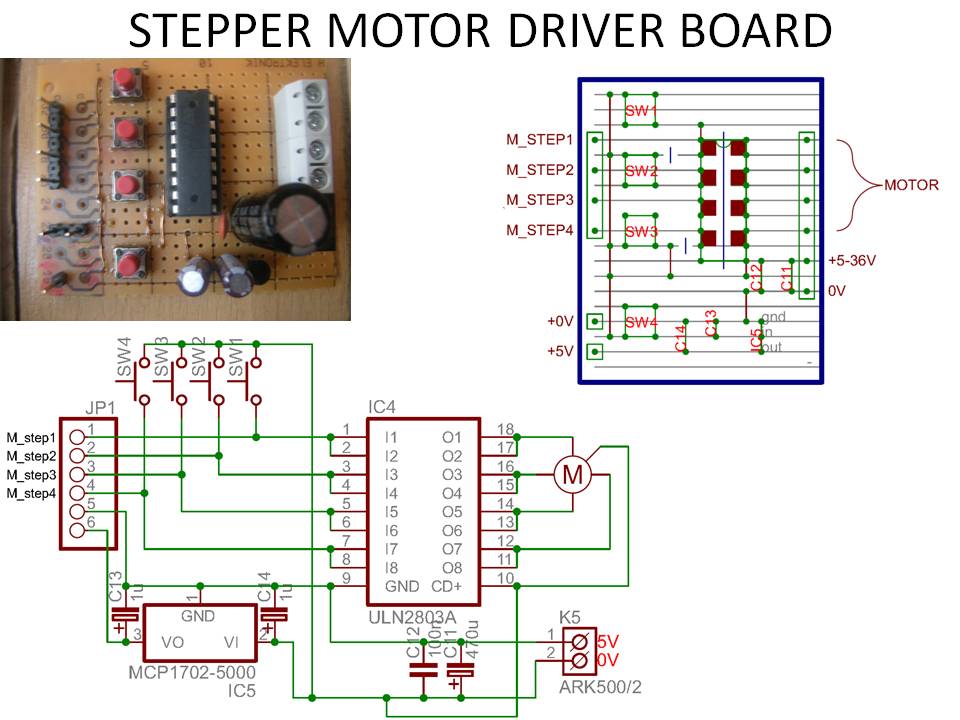
- Motors: 2 geared DC motors from truck windshield wipers,1x unipolar stepper motor from an old printer
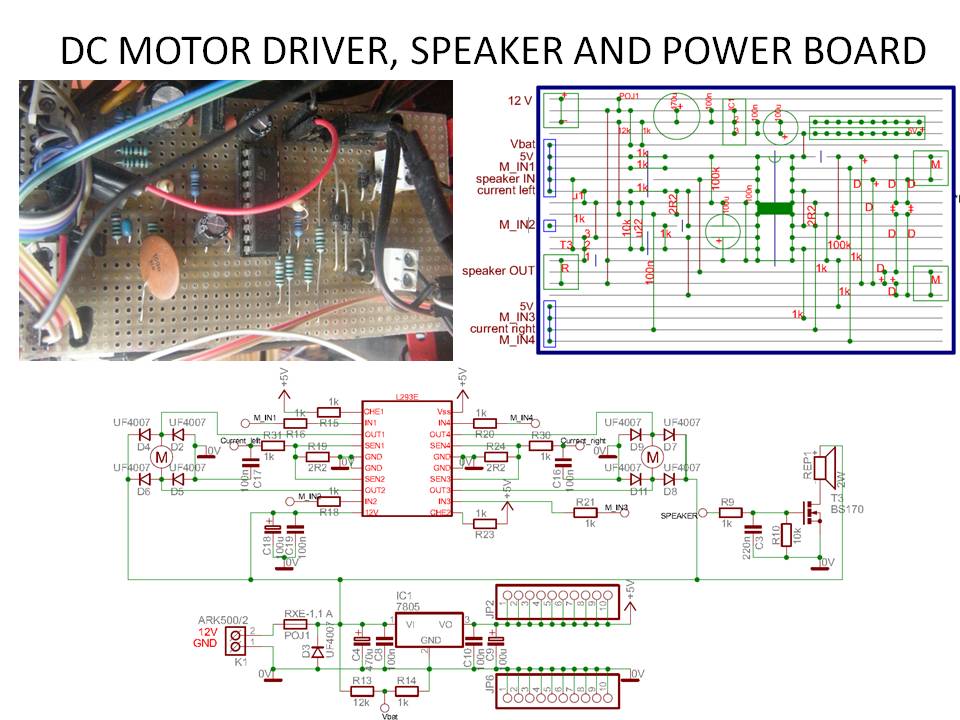
- Motor drivers: L293E (for two bidirectional DC motors with current measurement), ULN2803A (for the unipolar stepper motor)
- Display: Alphanumeric LCD 16x2
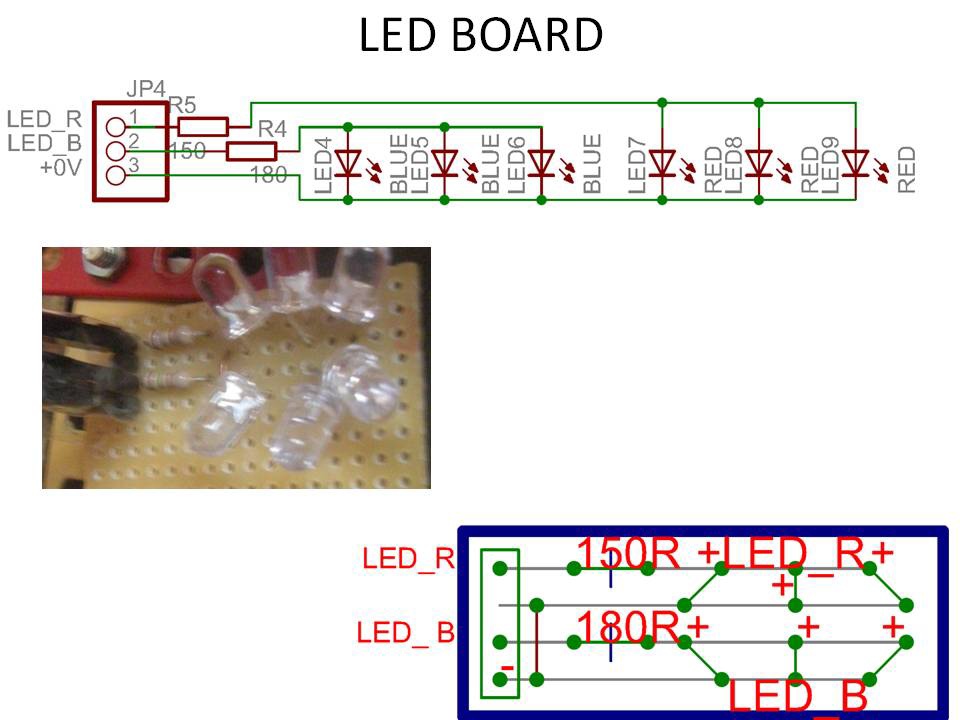
- Other outputs: 2.5W speaker, 3x blue LED, 3x red LED
- Control: Autonomous or IR remote controlled
- Mechanic parts: Merkur construction set (Meccano-like)
- PCB: Universal line PCB e=0.1”, the functional and soldering schemes in Eagle CAD are attached
- Target environment: indoor
I want to prepare the next version of Tractorbot Mk2 for a national competition in radio-electronics of youth and then to participate with it at the Czech robotic day in Spring 2015. Hope to see some of you there :-)
Intended features of the new version:
- A single board with MCUs and motor drivers, with remote sensors connected by IDC connectors and flat cables (not such a cable jungle like in this version)
- 2x PIC18F46K22 with mutual UART communication, one for graphic LCD and sensors, the other one for motor controls (a “multi-servo”)
- Two more stepper motors for a robotic hand (for Bear Rescue and Ketchup House contests)
- Total current measurement with a current shunt monitor
- Color sensor TCS3200
- Compression sensor made of ESD foam for a robotic hand (thanks OddBot!)

